

Fully-compliant deformable robot with controllable rigidity
A fully flexible and robotic technology, applied in the direction of program control manipulators, manipulators, manufacturing tools, etc., can solve problems such as mechanism damage, limited working range, and inability to continue working
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
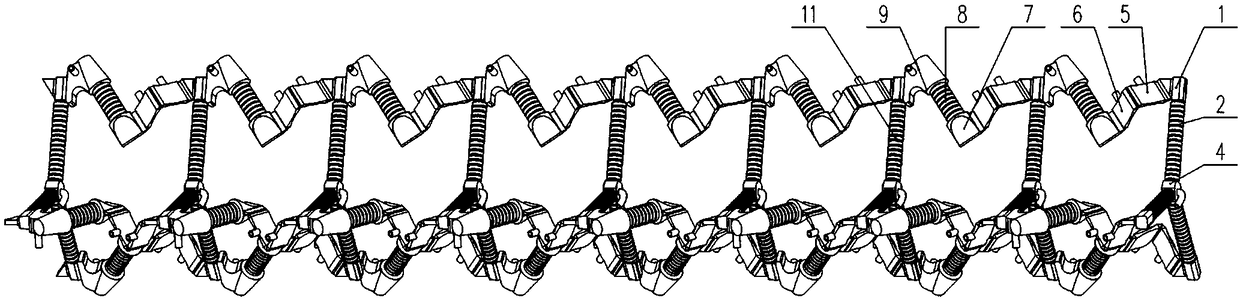
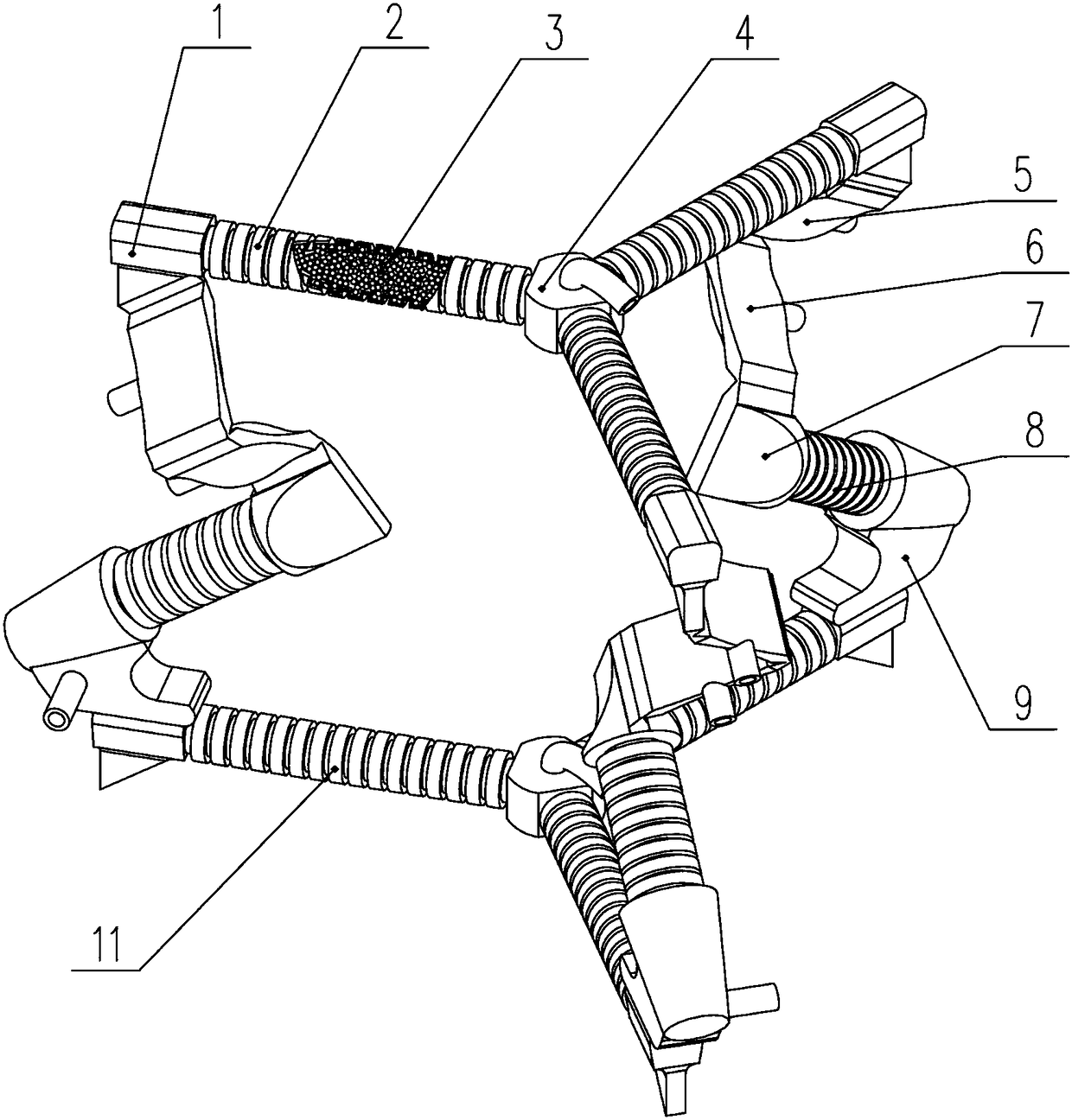
[0022] exist Figure 1 to Figure 4 In the schematic diagram of the present invention, the present invention is composed of multiple deformable mechanisms with the same structure, and the lower support end of an adjacent deformable mechanism serves as the upper support end of another deformable mechanism.
[0023] Each deformable mechanism consists of six first fixed ends, six first telescopic sleeves, two suction fixed ends, three first airbag rods, three second airbag rods, and three second fixed ends , three second telescopic sleeves and three inflatable control ends.
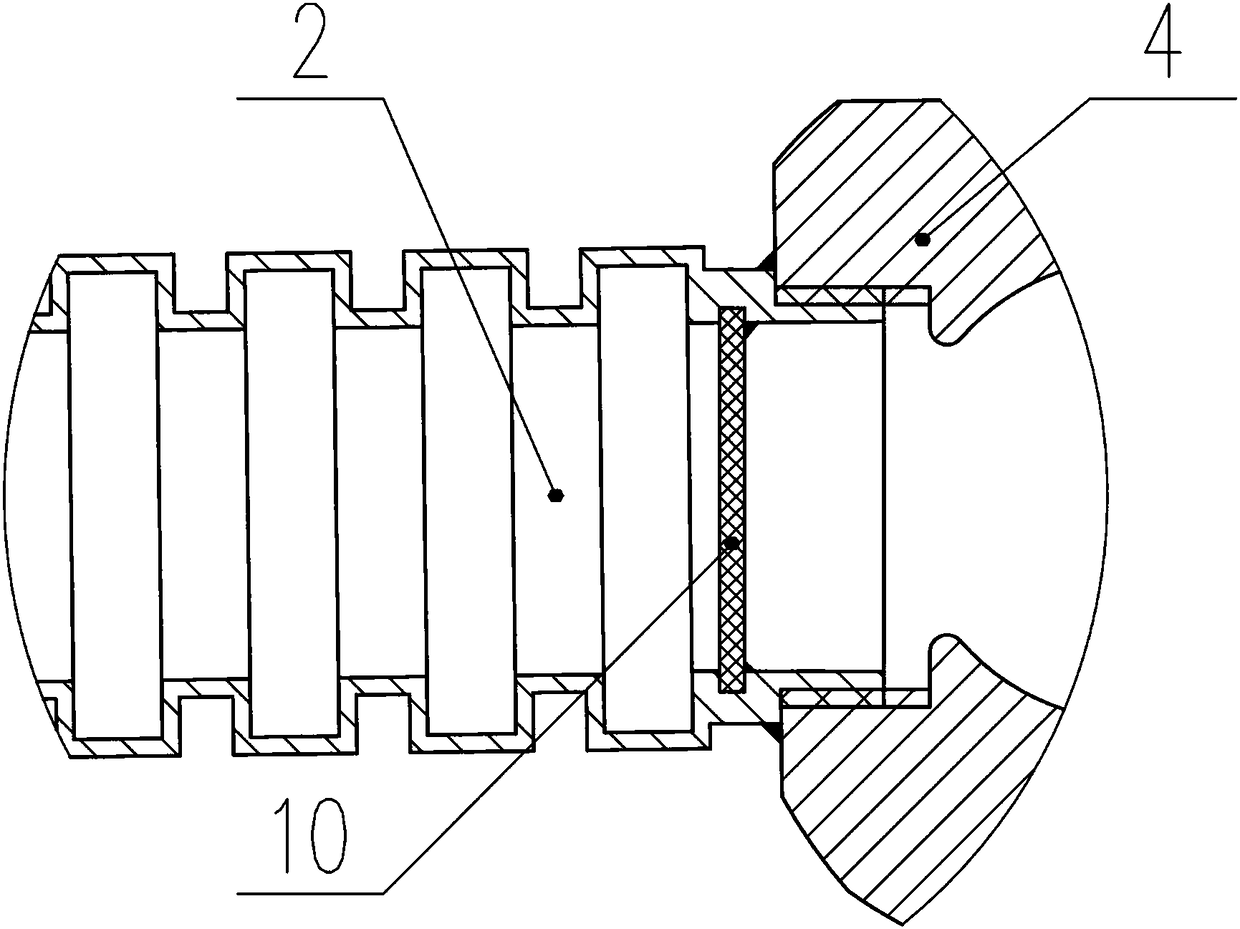
[0024] Wherein, the three first fixed ends 1 are respectively connected with one end of a first telescopic sleeve 11, and the other end of each first telescopic sleeve is plugged into the suction fixed end 4, and the three first fixed ends end, three first telescopic sleeves, and a suction fixed end to form a supporting end. The support end is divided into an upper support end and a lower support end, the s...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More