

Unmanned aerial vehicle independent pathfinding obstacle avoiding method and system
A technology for unmanned aerial vehicle and obstacle avoidance, which is applied in control/adjustment system, vehicle position/route/height control, non-electric variable control, etc. It can solve problems such as lack of performance in the field of dynamic environment, and achieve simple, fast and responsive calculation process Fast speed and good real-time effects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
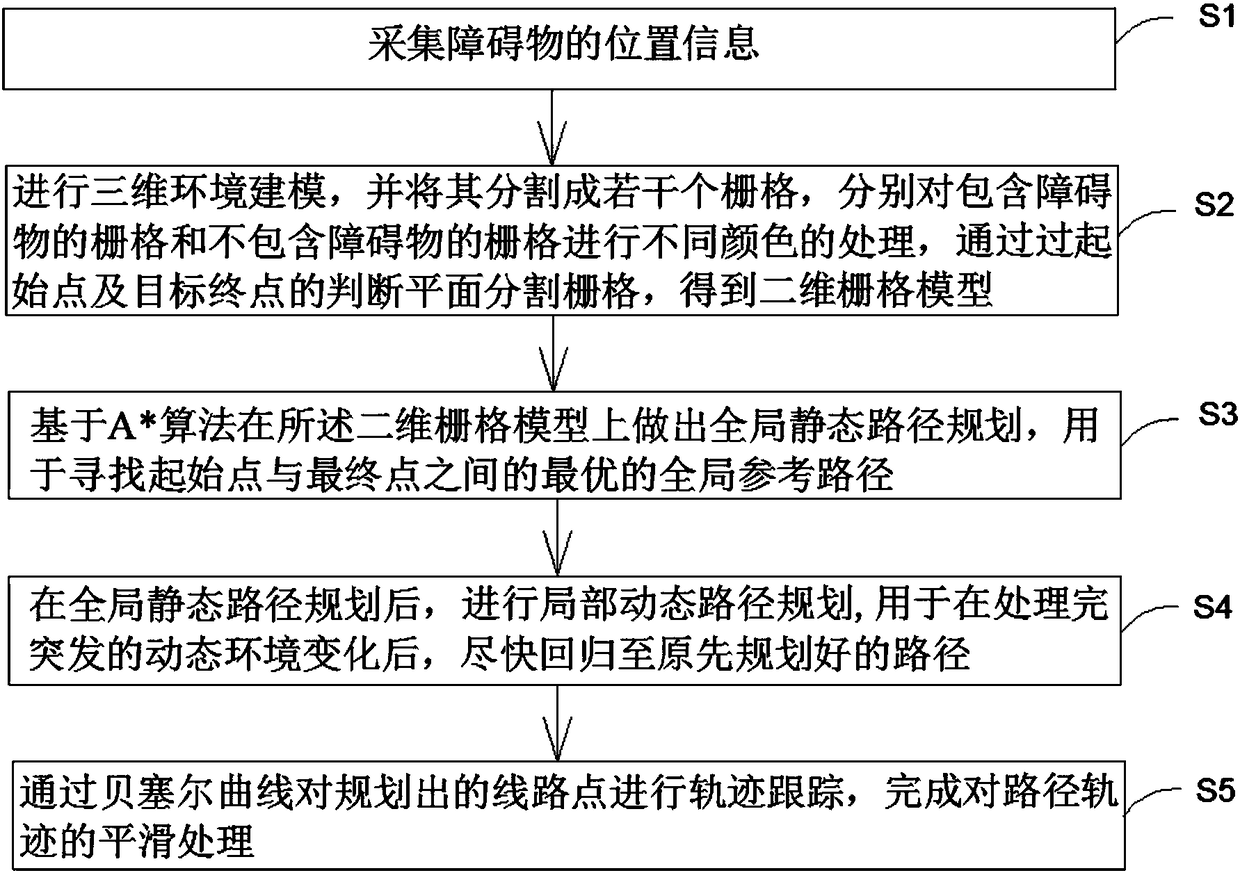
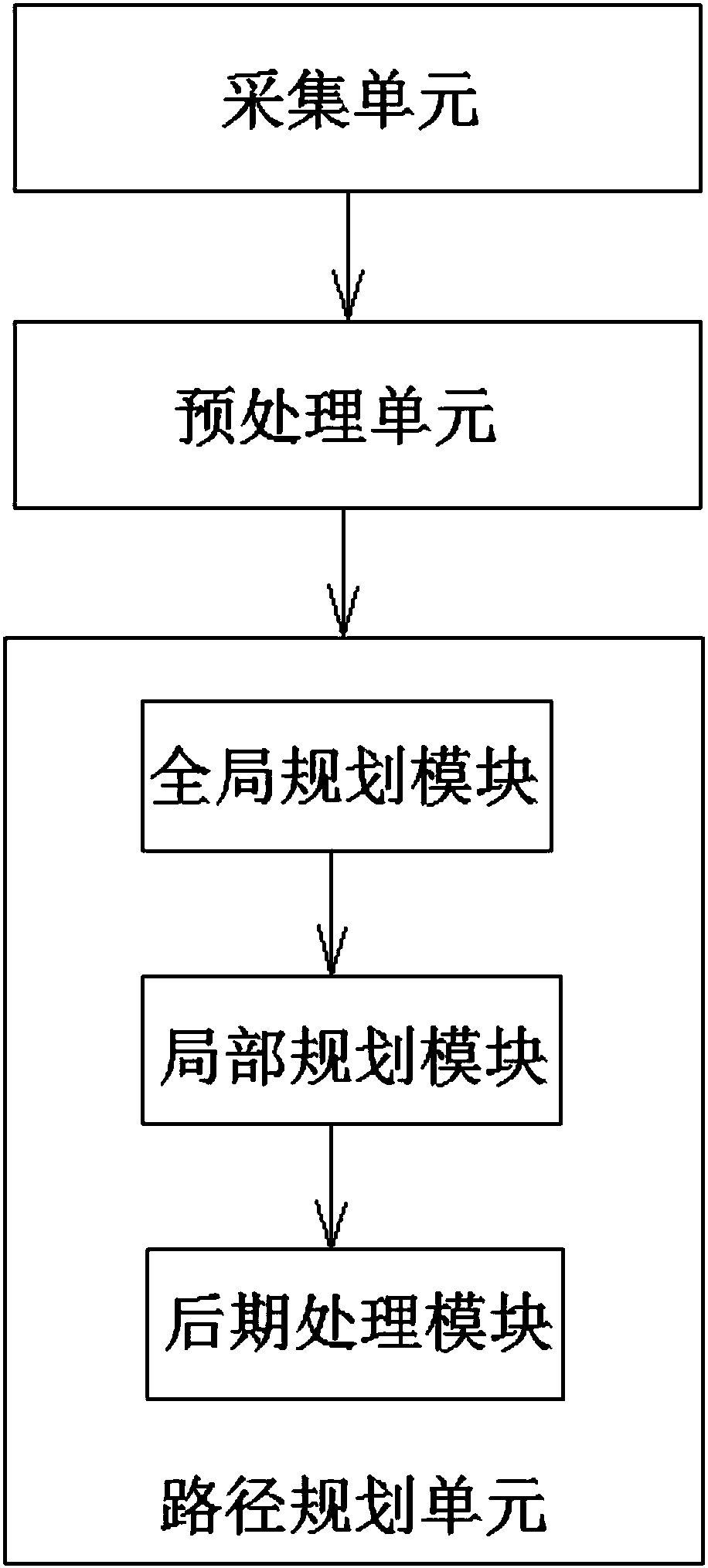
[0081] Embodiment 1, wherein, step S1 includes: obtaining the position information of the obstacle in the sensor coordinate system through laser and ultrasonic sensors, converting it to the UAV coordinate system through coordinate change, and then converting it to the inertial coordinate system through the navigation system The position of the system is displayed, so as to obtain the position information of the dynamic obstacle.
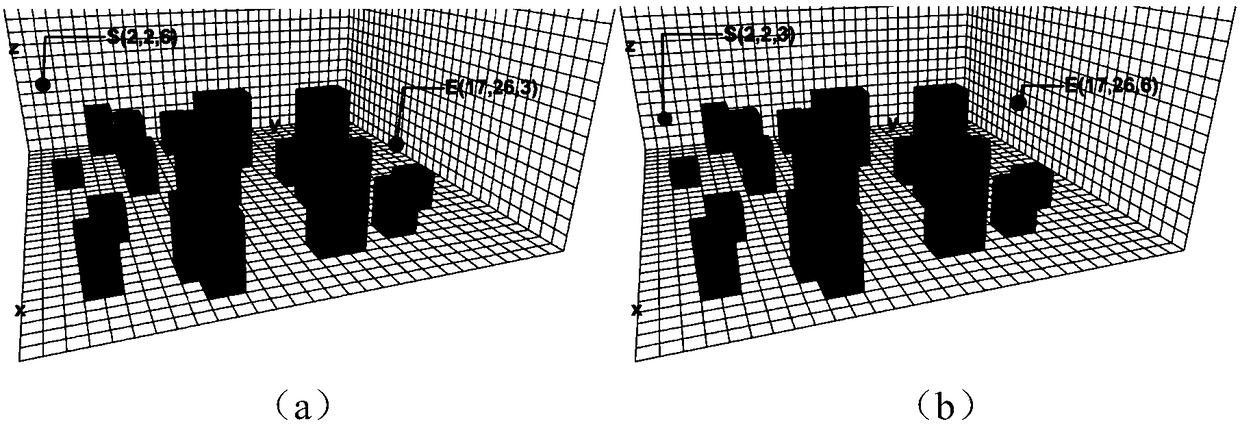
[0082] The planning space is divided into several basic units with regular shapes by using the unit decomposition modeling method. Each basic unit is divided into nodes containing obstacles and nodes not containing obstacles. These nodes can intuitively describe the environmental information and facilitate Computer storage, and at the same time, each node is convenient to split, which is convenient for planning algorithm processing operations.
[0083] The grid method for 3D environment modeling is to divide the limited 3D planning space into units o...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More