

A control method, chip and robot for constructing grid map
A grid map and control method technology, applied to road network navigators and other directions, can solve problems such as increased hardware system load, limited cleaning area, and map beyond the boundary, etc., to achieve simple algorithm steps, expand the coordinate area, and improve utilization rate effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0042] The technical solutions in the embodiments of the present invention will be described in detail below with reference to the drawings in the embodiments of the present invention. It should be understood that the specific embodiments described below are only used to explain the present invention, not to limit the present invention.
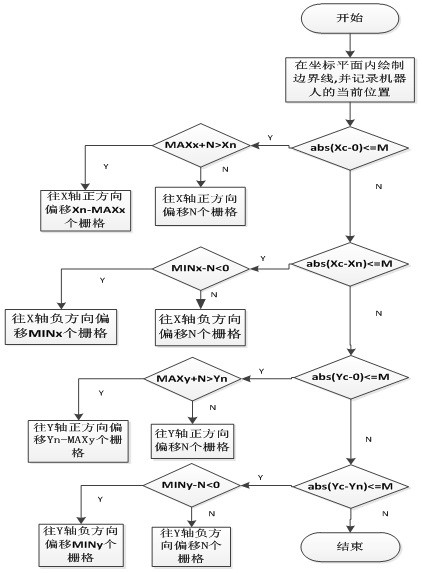
[0043] The robot described in the present invention is a sweeping robot, and the grid map is constructed by using the distance information obtained by the distance information sensor, the angle information obtained by the angle information sensor, the collision information obtained by the collision detection sensor, and the obstacle information obtained by the obstacle detection sensor. With the help of this map, self-positioning and route planning can be conveniently performed. This implementation uses rasterized maps.
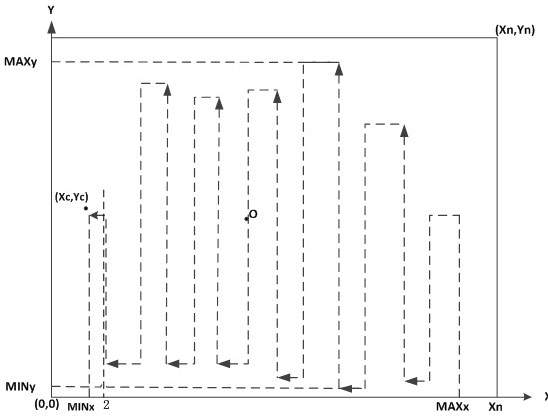
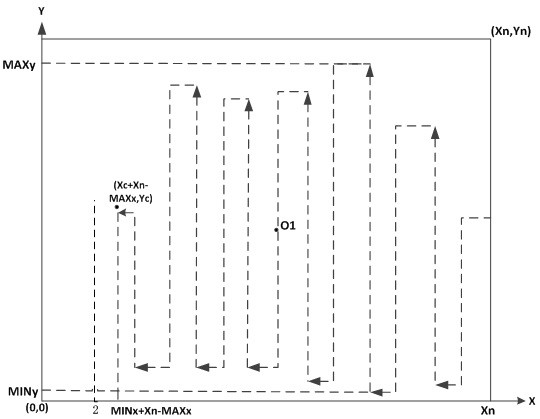
[0044] When the robot is running, it can be considered as running on a two-dimensional plane. Take any point in the worki...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More