

Augmentation adaptive fuzzy control method for space robot space trajectory tracking
A space robot, adaptive fuzzy technology, applied in the direction of adaptive control, two-dimensional position/channel control, general control system, etc., can solve the problem of space robot operation space trajectory tracking under uncertain model parameters
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0052] The technical solution of the present invention will be specifically described below in conjunction with the accompanying drawings.
[0053] The technical solution of the present invention is: an augmented adaptive fuzzy control algorithm for floating-based space robot operation space trajectory tracking, including the following specific steps:
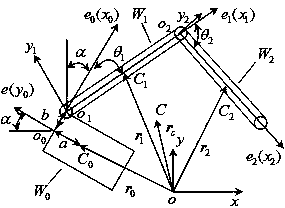
[0054] Step S1: Establish the dynamic equation of the joint space system in an underactuated form;
[0055] Step S2: Using the system motion relationship, deduce the corresponding operating space system dynamics equation;
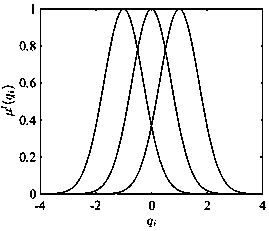
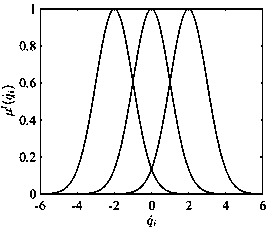
[0056] Step S3: Applying the idea of fuzzy approximation to perform fuzzy approximation processing on each uncertain function item of the system;
[0057] Step S4: Introduce an adaptive regulation law to adjust the fuzzy weights in real time, and then design an adaptive fuzzy controller to achieve precise tracking of the desired trajectory in the system operation space.
[0058] In an embodiment of the p...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More