

Intestinal microcapsule robot with multi-directional living body sampling function
A technology of microcapsules and robots, which is applied in the field of medical devices, can solve problems such as the inability to realize multi-point biopsy and accurate sampling at one time, the single biopsy function of the capsule robot, and the low stability of transmission motion, and achieve simple structure, easy control, and surgical operation. less traumatic effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0023] The present invention will be further described below in conjunction with the accompanying drawings and specific embodiments.
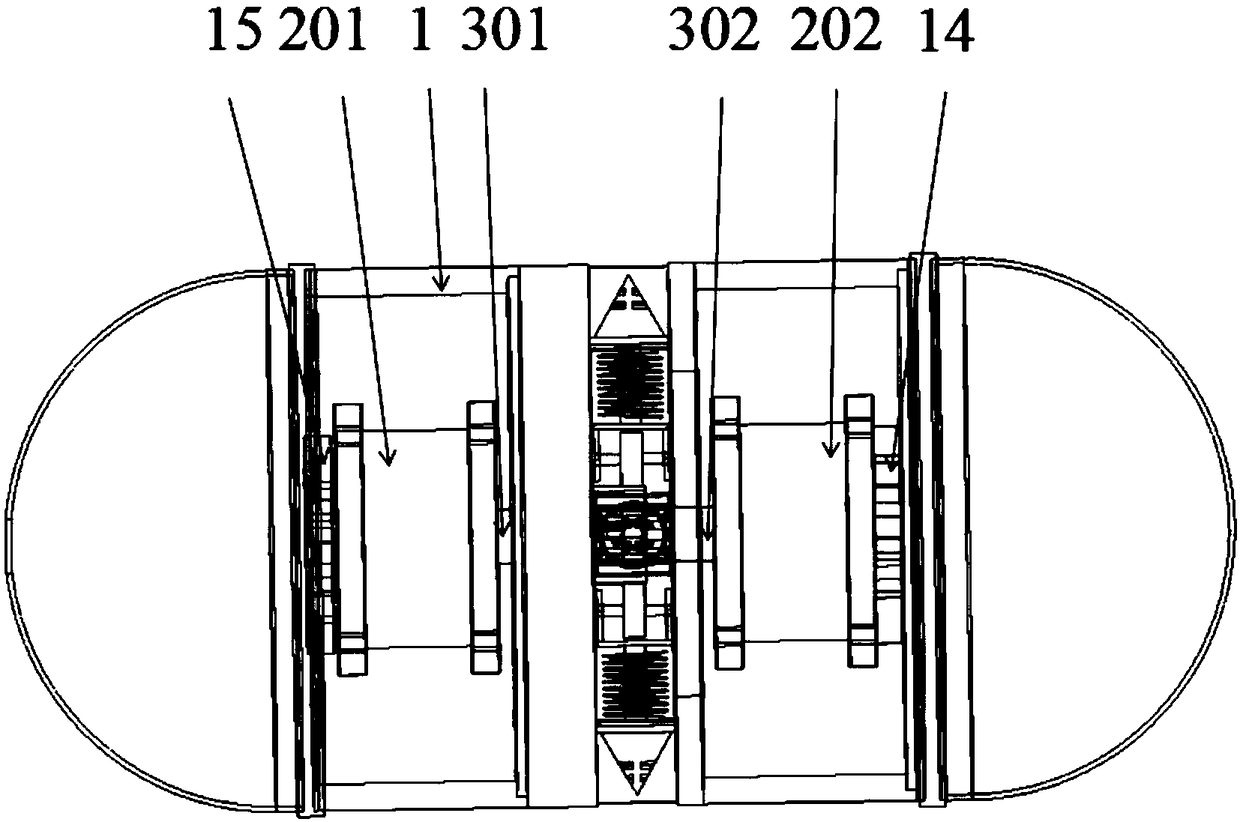
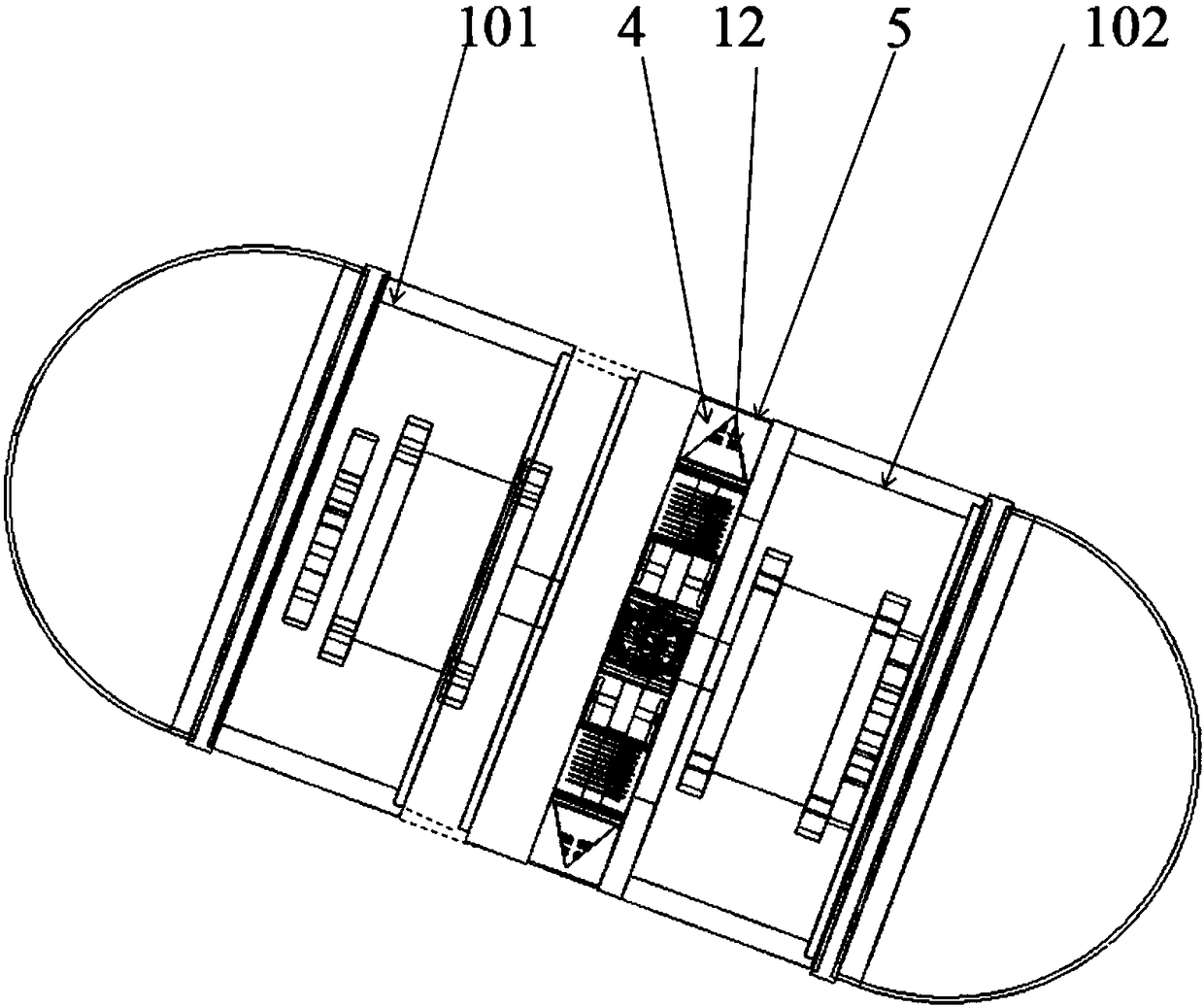
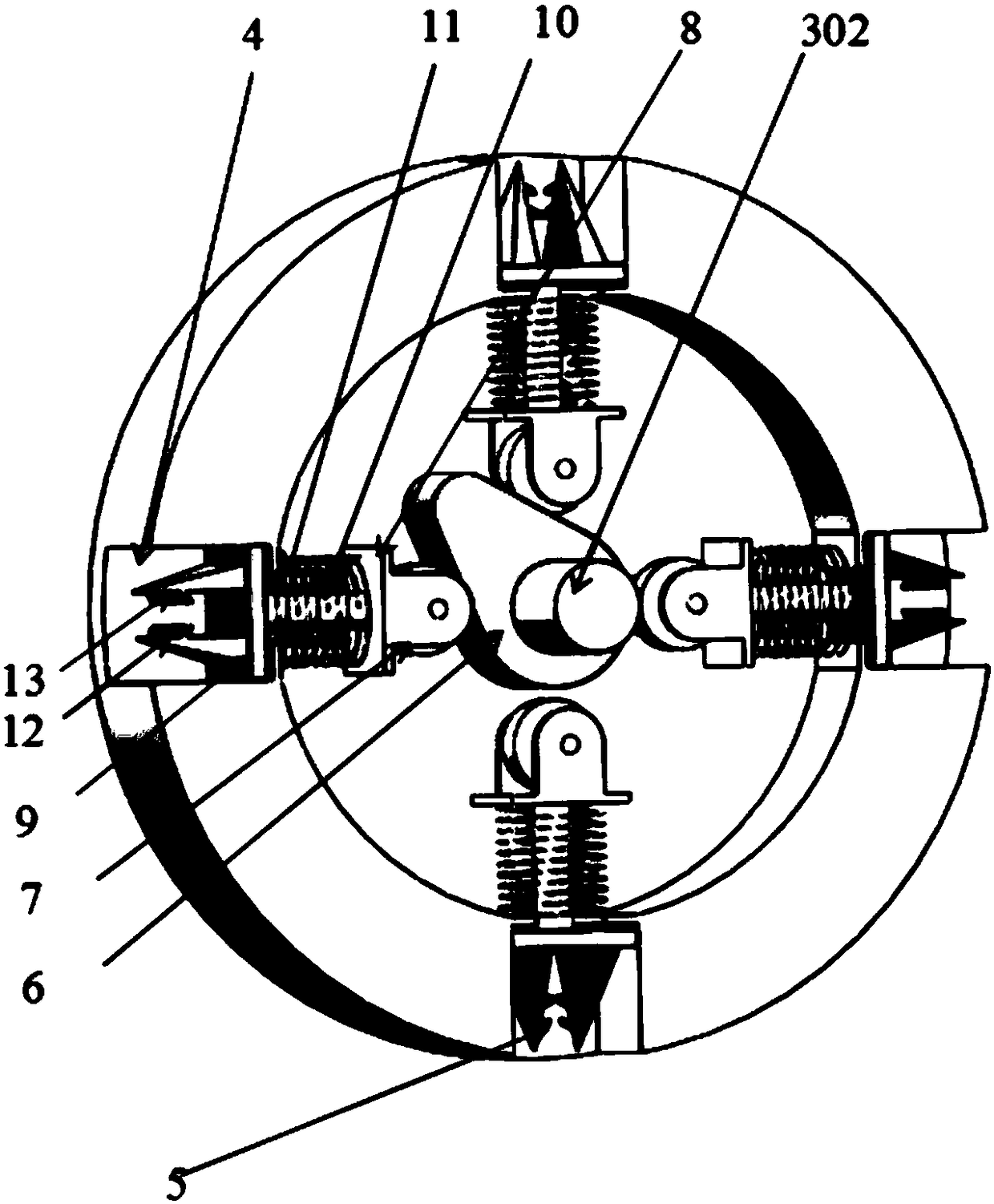
[0024] Such as figure 1 Shown is a intestinal microcapsule robot with multi-directional living body sampling function of the present invention, including a capsule housing 1 and a controller 14, a propeller 15, a motor 2, a drive motor shaft 3 and Sampling device, the outer wall of the capsule housing is provided with some sampling ports 5 at equal intervals along the circumference, and the inside of the housing is provided with sampling slots 4 corresponding to the sampling ports 5. The sampling slots are trapezoidal slots, and the cross-sectional area of the trapezoidal slots is determined by Grow from the inside out. A sampling device is provided in the sampling tank 4, such as Figure 3-Figure 4 As shown, the sampling groove 4 extends from the inside of the capsule shell 1 to the sampling port 5 on the outer wall of the capsule shell; ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More