

A Flexible Manipulator Based on Elastic Tube
A flexible manipulator and elastic tube technology, applied in the field of intelligent manipulators, can solve the problems of heavy rigid joints, poor flexible bending effect, and small bending curvature, etc., and achieve the effect of compact structure, high degree of freedom, and high compliance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0025] The present invention will be further described below with reference to the accompanying drawings and in combination with preferred embodiments.
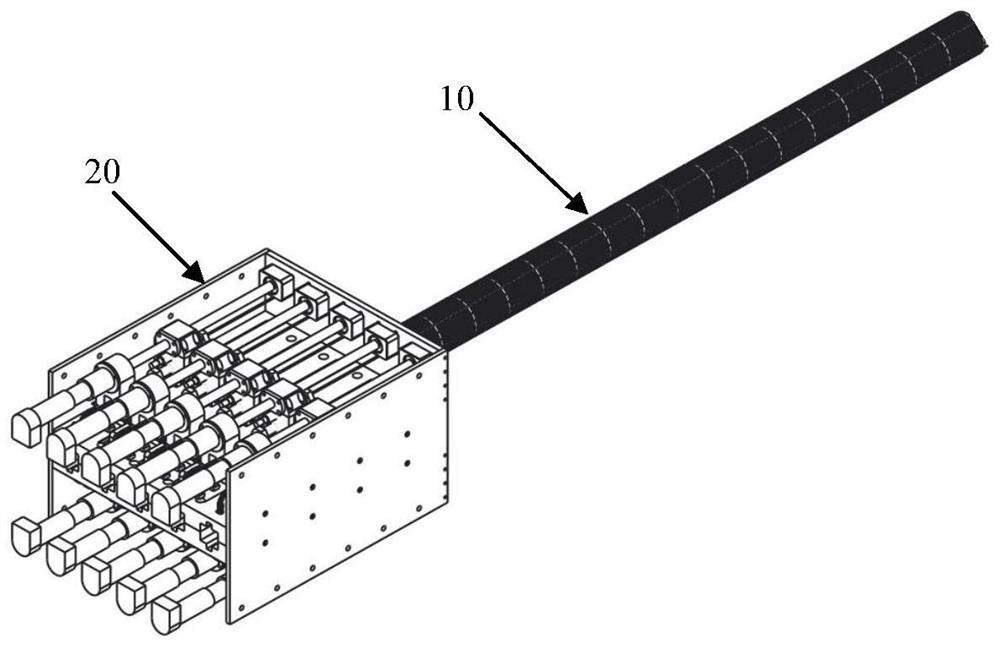
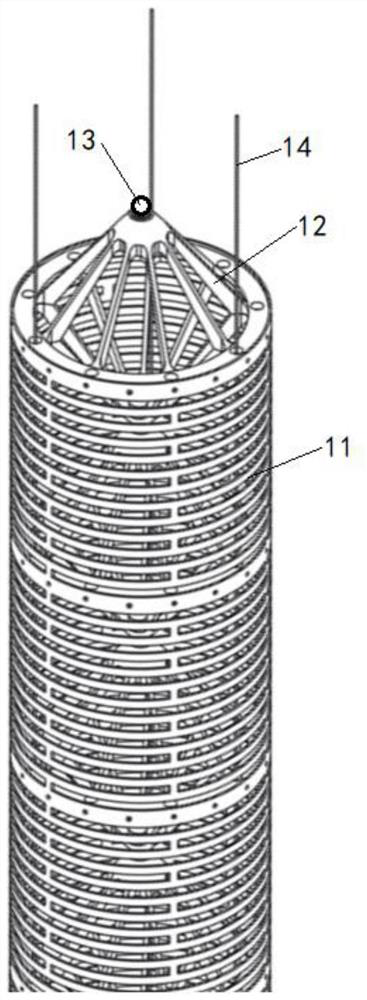
[0026] Such as figure 1 As shown, the preferred embodiment of the present invention discloses a flexible mechanical arm based on an elastic tube, including an arm segment mechanism 10 and a driving mechanism 20, combined with figure 2 , the arm segment mechanism 10 includes an elastic tube 11 and 5 joint segments that are sequentially connected to each other, the elastic tube 11 is integrally sleeved outside the 5 joint segments that are sequentially connected to each other, and each joint segment includes a plurality of joint modules 12, a plurality of A ball joint 13 and a plurality of ropes 14.
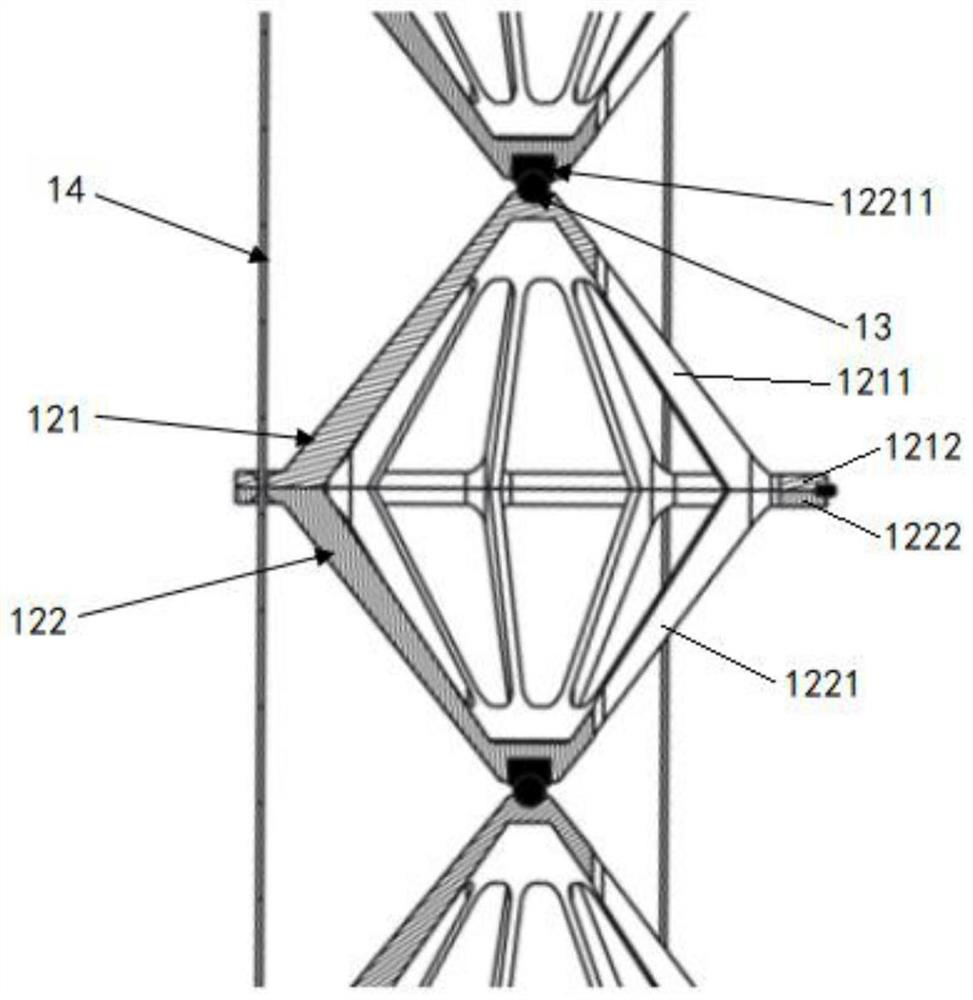
[0027] combine image 3 , the joint module 12 includes two interconnected joint units 121, 122, the joint unit 121 comprises a conical protrusion 1211 and a flange 1212 respectively, the joint unit 122 comprises a conical protr...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More