

A Track Planning Method for Unmanned Surface Vehicles Based on Quantum Ant Colony Algorithm
A track planning and ant colony algorithm technology, which is applied in the field of unmanned surface vehicle track planning based on quantum ant colony algorithm, can solve the problem of slow calculation speed of ant colony algorithm, and achieve the effect of improving the calculation speed
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0048] The specific embodiment of the present invention will be further described below in conjunction with accompanying drawing:
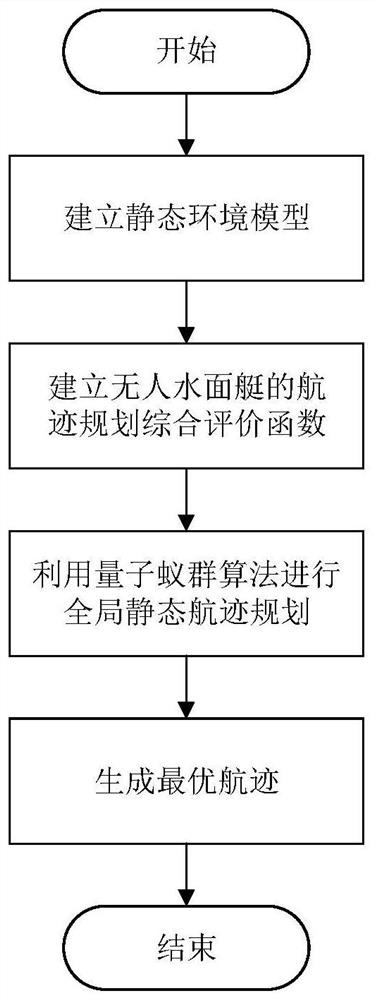
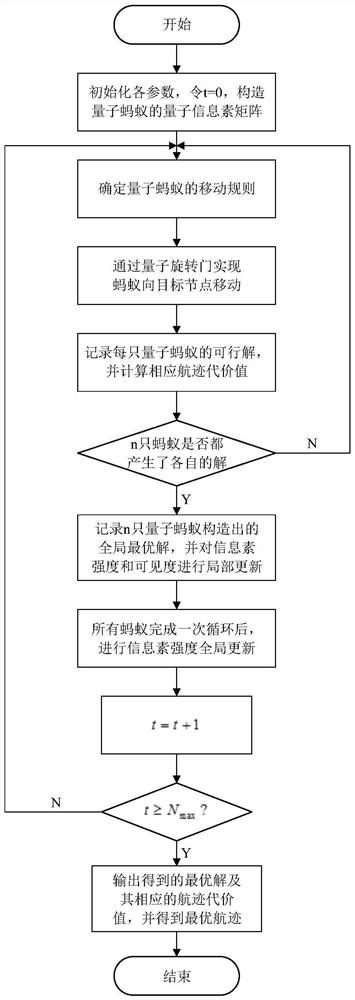
[0049] figure 1 It is a flow chart of the algorithm implementation steps designed by the present invention, which is characterized in the following steps:
[0050] Step 1. According to the distribution of obstacles in the geographic information database, the static environment model of the navigation area is established, and the described content specifically includes:
[0051] 1-1) According to the obstacle position information in the electronic chart, the obstacles in the navigation area are represented by polygons, and their heights are ignored;
[0052] 1-2) Use the environmental information obtained in the above steps as modeling data, and use the grid method to model the static environment of the two-dimensional navigation area of the unmanned surface vehicle. The track planning area needs to be based on the starting point, target point a...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More