

AUV route planning method based on improved artificial potential field optimization algorithm
An optimization algorithm, artificial potential field technology, applied in vehicle position/route/height control, non-electric variable control, instruments, etc., can solve problems such as unreachable target and local minimum value, and achieve reduced complexity and easy to find. Optimality, the effect of improving optimality and robustness
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
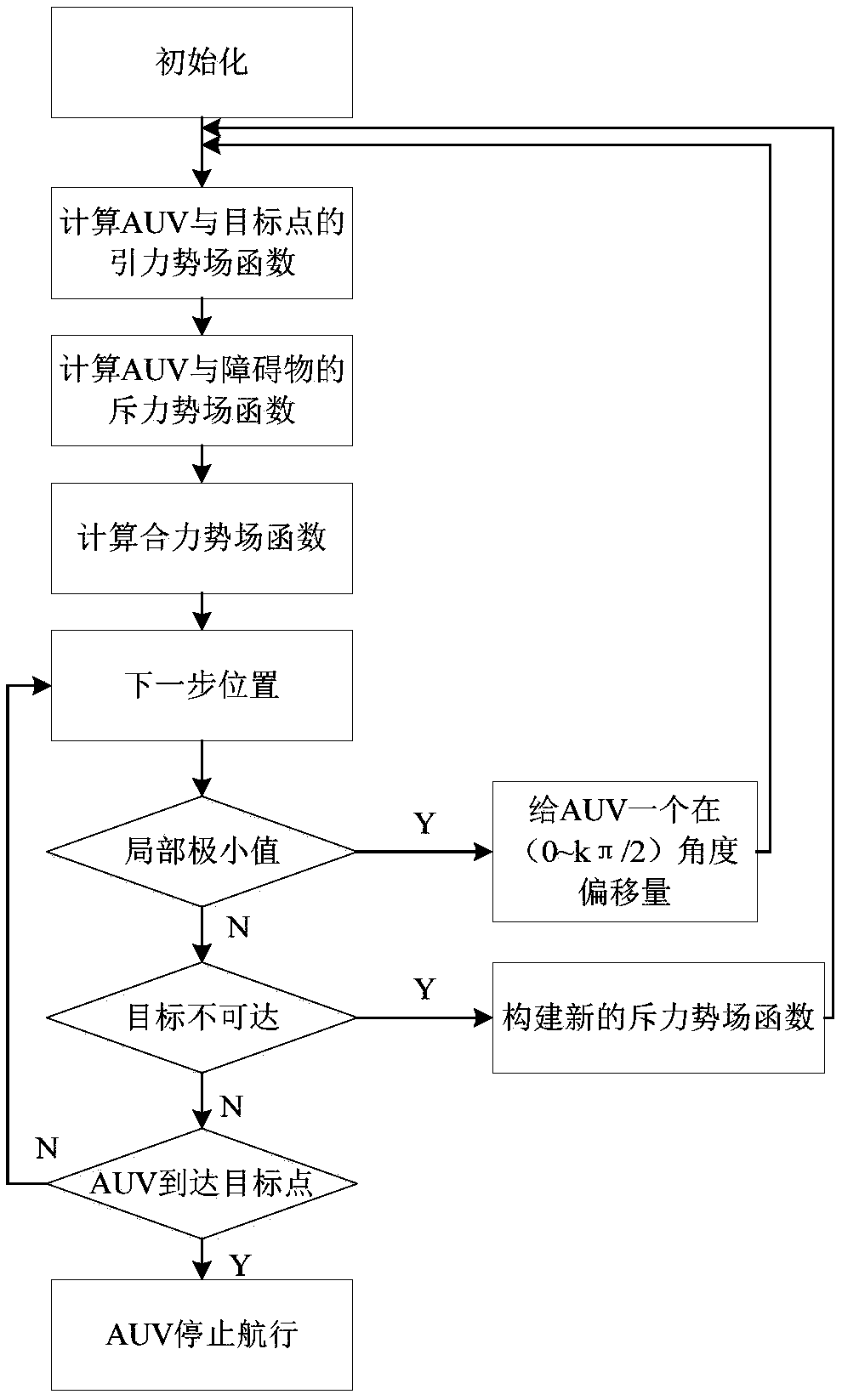
[0066] The present invention is an AUV route planning method that improves the artificial potential field optimization algorithm. The following will take a three-dimensional environment as a marine mission environment, 1 AUV carrying a reconnaissance sensor module, 3 reconnaissance missions, and 4 obstacles as an example. The implementation of the improved algorithm is described. The method flow of the present invention is as follows figure 1 shown:
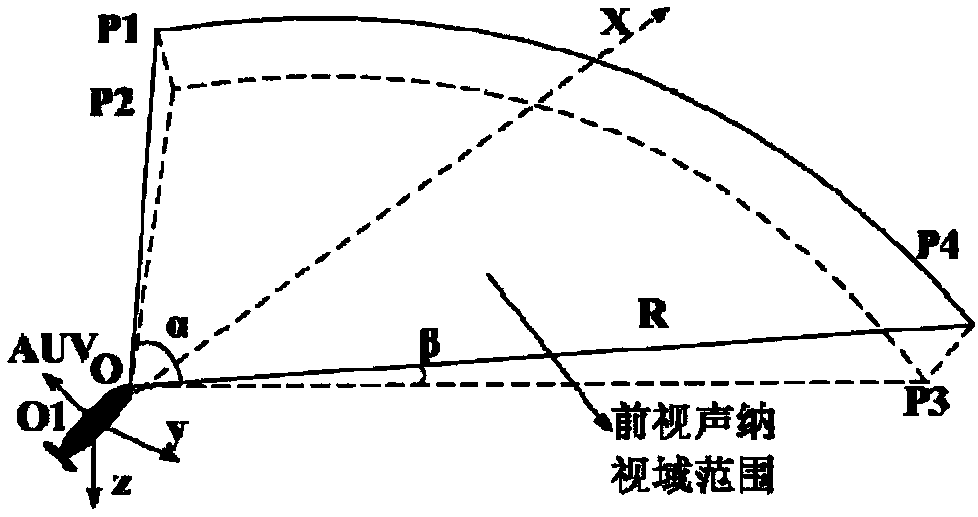
[0067] S1: It is necessary to establish an environmental model in the unknown environment of the ocean, and obtain the location information of obstacles through multi-beam sonar. The horizontal opening angle of the sonar is α=120°, 3 beams, the vertical opening angle is β=17°, and there are 80 beams, so the multi-beam sonar has a total of 240 beams. The detection distance is R=120m, and the working frequency is 2Hz.
[0068] S2: Initialization work: It mainly includes the initialization of the surface workstation, the download...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More