

Joint angle error compensation experiment device and method based on nerve network
A joint angle error and experimental device technology, applied in biological neural network models, neural architecture, medical science, etc., can solve problems such as high cost, serious delay, and difficult signal recognition and classification, and achieve low cost, simple implementation, and Realize the effect of non-contact measurement
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0042] Below in conjunction with accompanying drawing and specific embodiment the present invention is described in further detail:
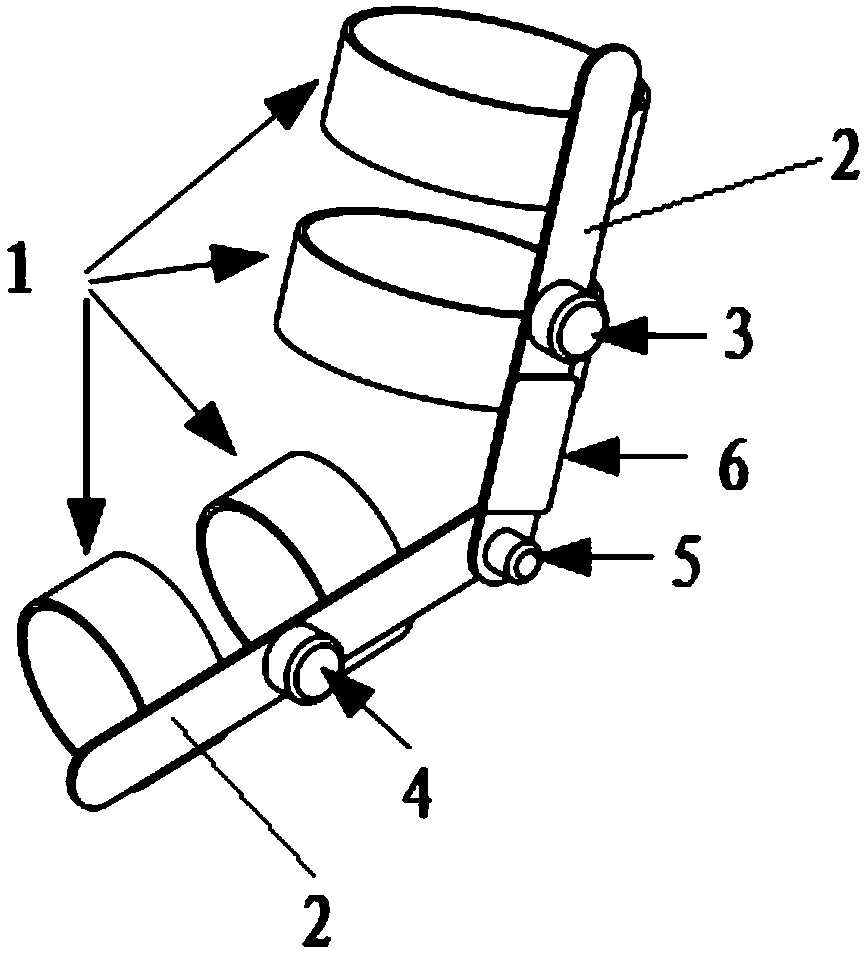
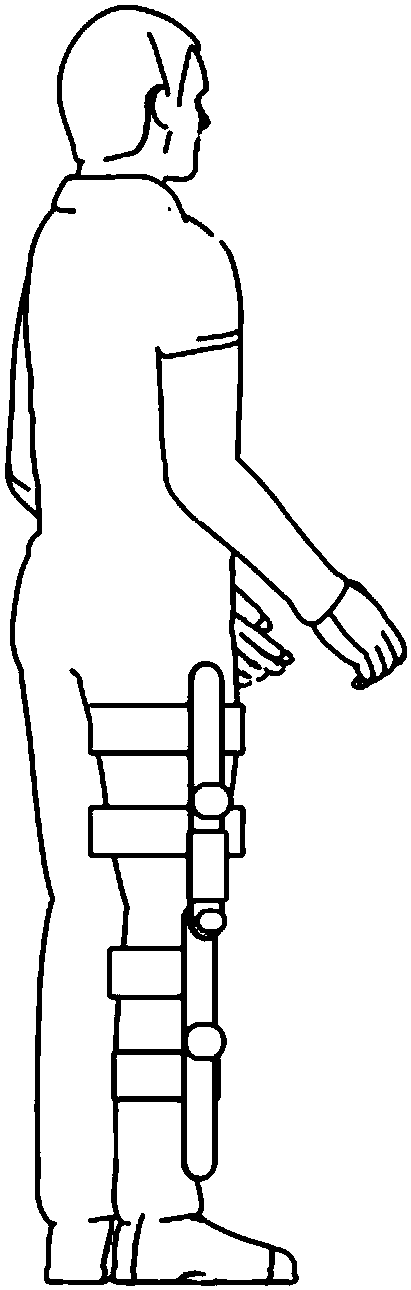
[0043] The invention provides a neural network-based knee joint angle error compensation method and an experimental device. By performing gait walking experiments in advance, learning samples are obtained, and the neural network is trained to obtain optimal model parameters. After wearing an exoskeleton, two exoskeletons are worn. The gyroscope and the trained neural network model realize the accurate measurement of the knee joint angle.
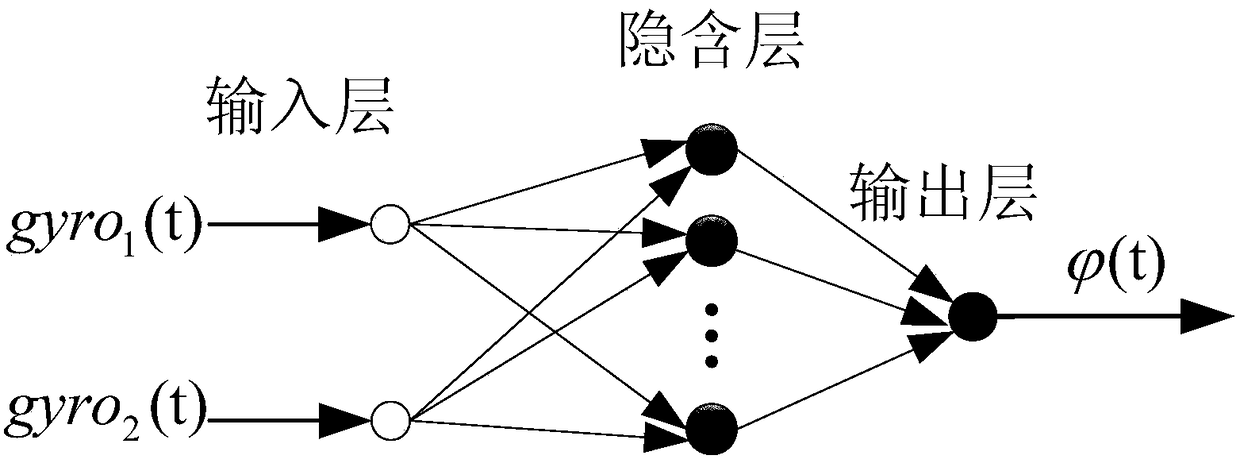
[0044] The technical solution of the present invention is: utilize the own nonlinear mapping relationship and generalization ability of neural network, select the forward neural network model of double input and single output, collect the sensor data of human body gait experiment as learning sample, train neural network The optimal model parameters are obtained. At this time, the real-time high-precision measu...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More