

Petri net-based autonomous underwater vehicle decision layer discrete event dynamic system control method
An underwater vehicle, discrete event technology
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0032] Embodiments of the present invention are described in detail below, and the embodiments are exemplary and intended to explain the present invention, but should not be construed as limiting the present invention.
[0033] In this embodiment, TH50I-AUV pre-programmed AUV is taken as an example to illustrate:
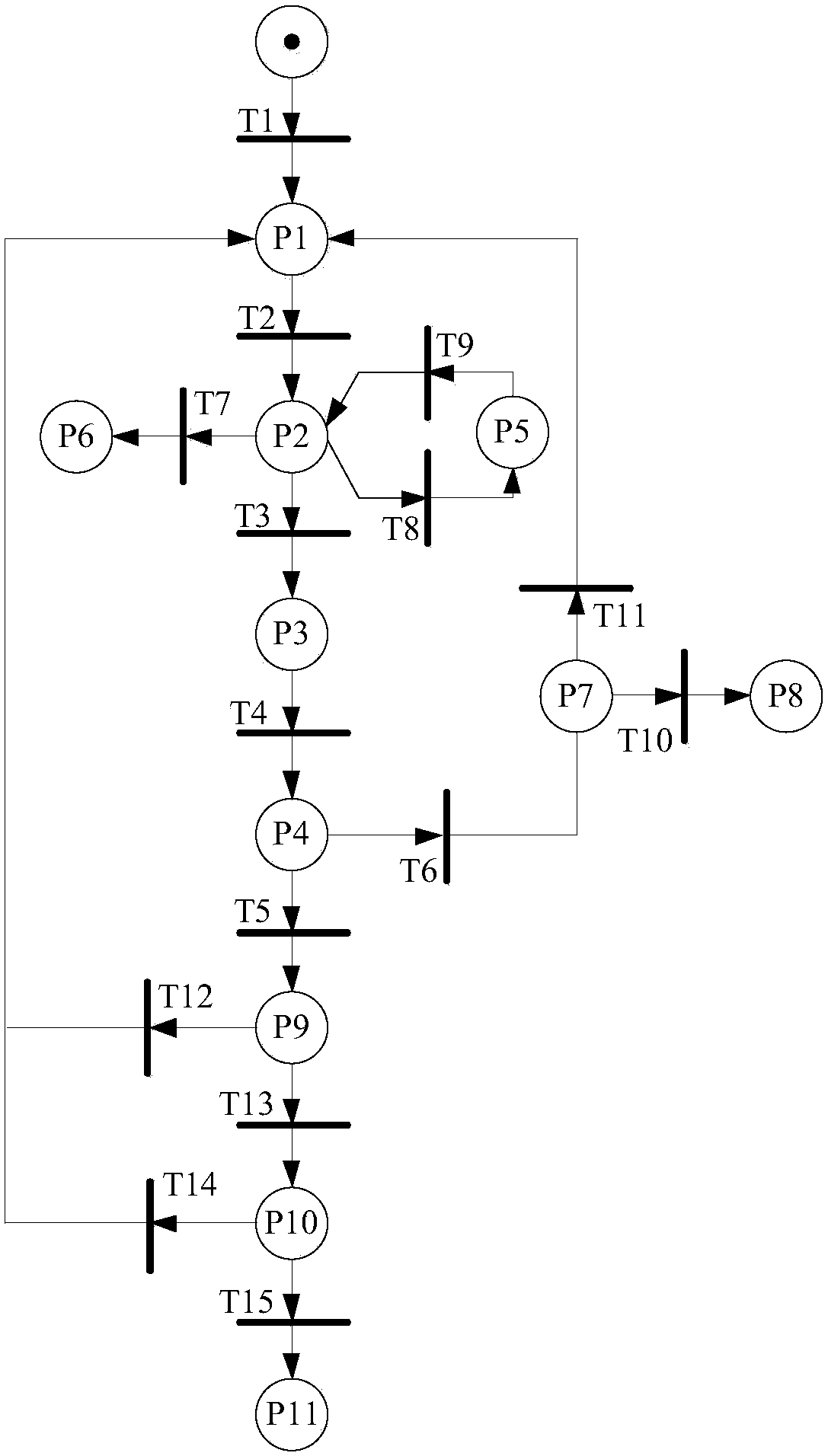
[0034] The initial state of the aircraft means that the aircraft is not powered on. When using the self-observation AUV, it is first powered on and powered on, and enters the system self-inspection state. After the self-inspection is completed, it enters the state of preparing to sail. According to the self-inspection log, the personnel conduct manual inspection, and then analyze the fault to ensure that all parts of the aircraft are working normally, and start the startup process again.
[0035] In the navigation preparation state, the operator can download the mission file to the aircraft memory, and the aircraft will pre-read the mission file and return the read ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More