Under-actuated hand palm supporting many layouts of fingers
A finger and palm technology, applied in the field of under-actuated hands, can solve the problems of different degrees of flexibility in mechanical hands, and achieve the effect of simple and beautiful design, reduced number of parts, and compact structure
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0019] The present invention will be further described below in conjunction with the accompanying drawings and specific embodiments.
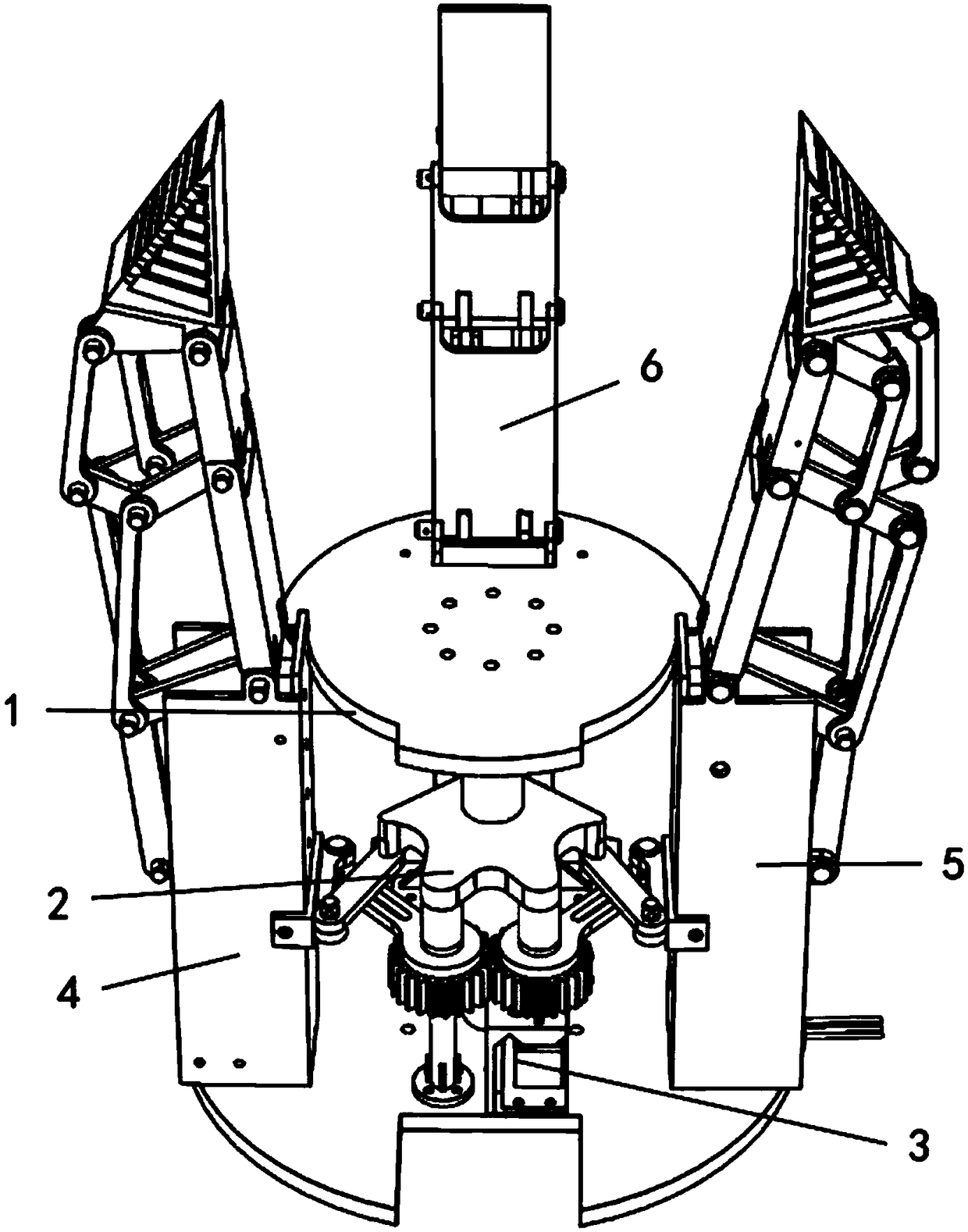
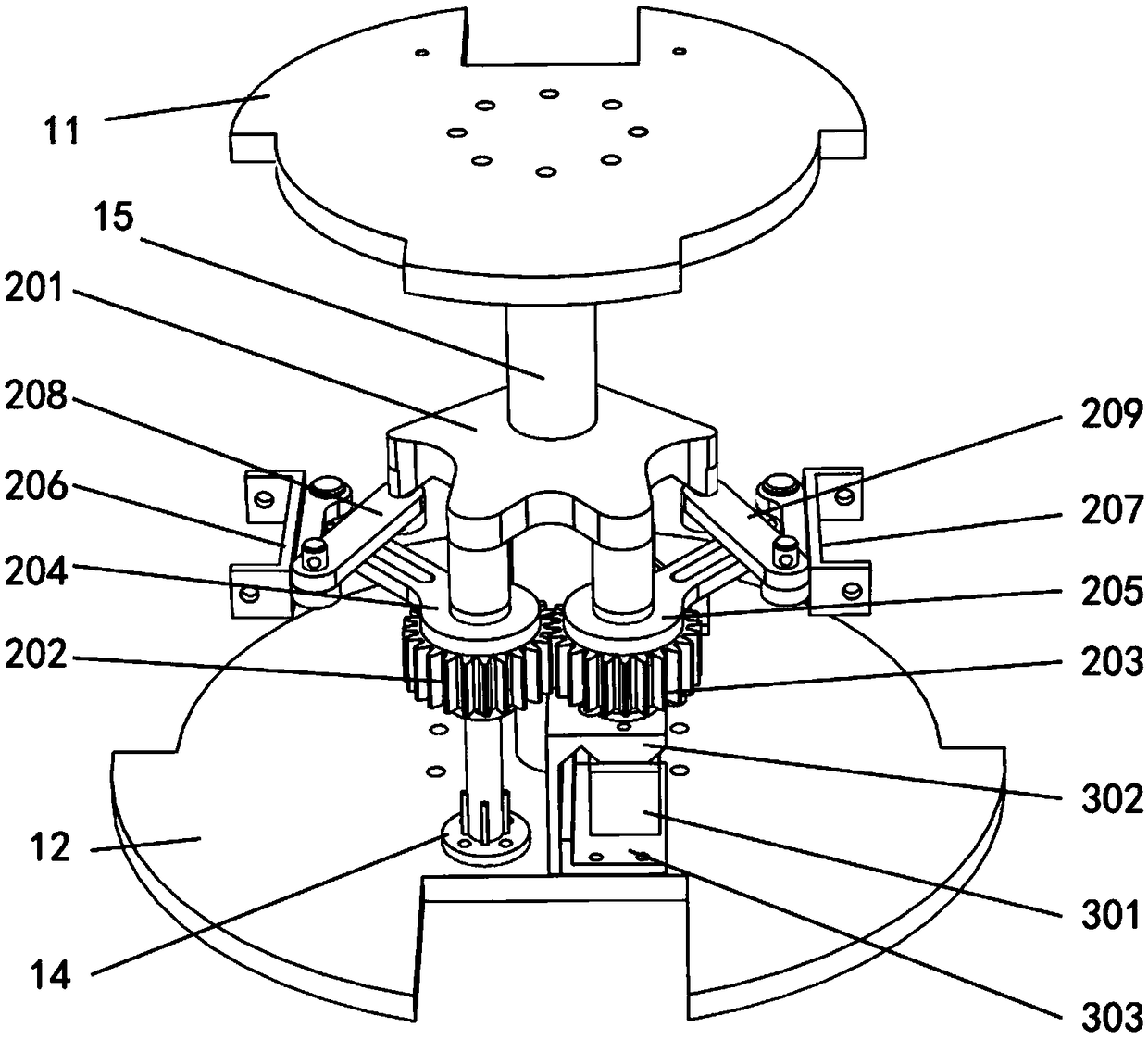
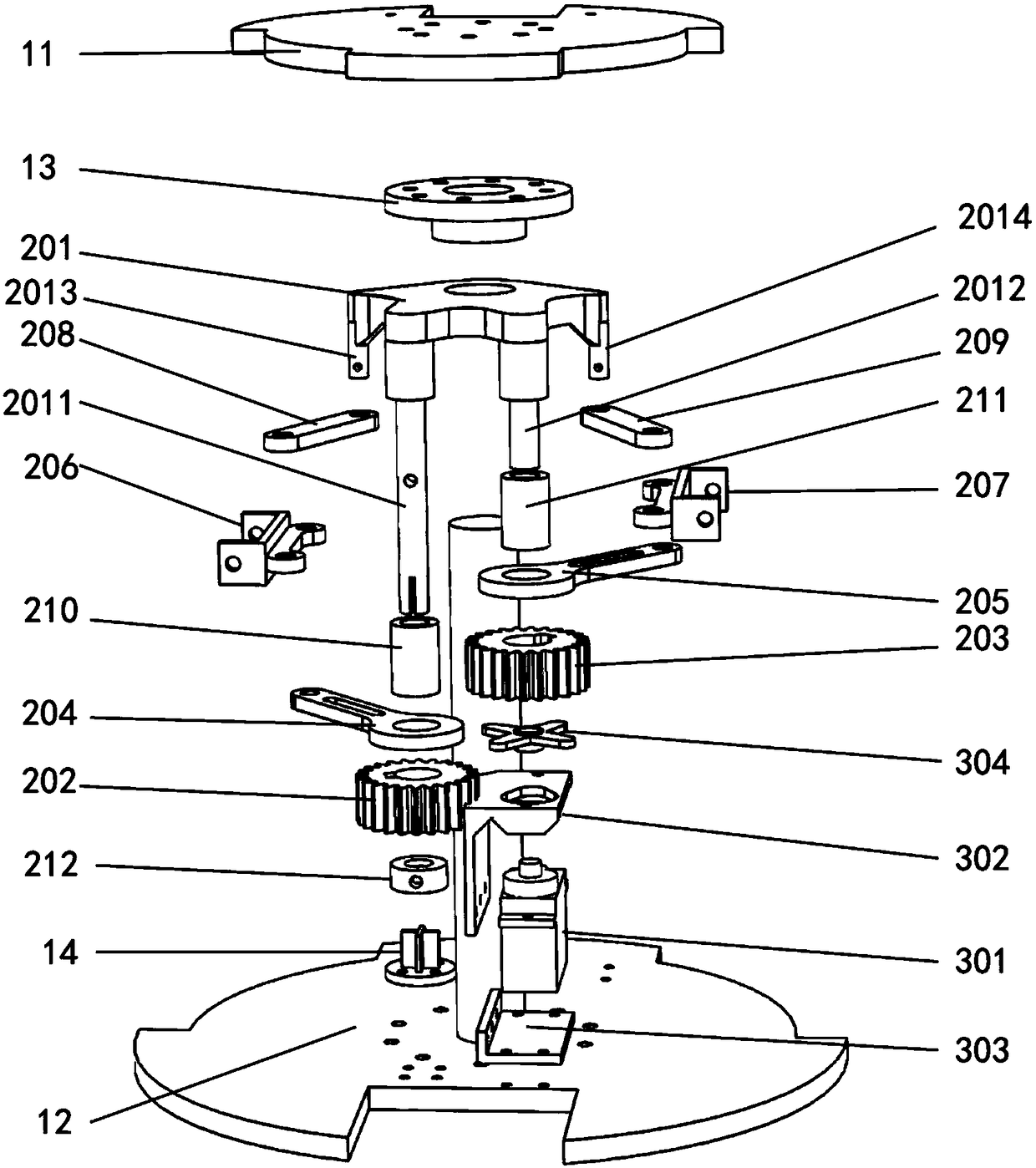
[0020] The specific embodiment of the present invention provides an underactuated hand palm that supports multiple layouts of fingers, refer to figure 1 and figure 2 , figure 2 yes figure 1 The structural schematic diagram of the remaining part of the palm structure after removing the three finger structures, the palm of the under-actuated hand includes the palm frame 1 and the transmission assembly 2 installed on the palm frame 1, the drive assembly 3, the first movable finger 4, the second Two movable fingers 5 and fixed fingers 6; the palm frame 1 plays the skeleton supporting role of the whole palm structure. The transmission assembly 2 includes a transmission frame 201 , a first four-bar linkage transmission mechanism, a second four-bar linkage transmission mechanism, a first gear 202 , and a second gear 203 . The first movable finge...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More