

Correction method of electronic compass
An electronic compass and correction method technology, applied in compass, measuring device, surveying and navigation, etc., can solve the problem of no error compensation parameter re-correction function, inability to compensate for soft magnetic interference and hard magnetic interference, and complicated calibration.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
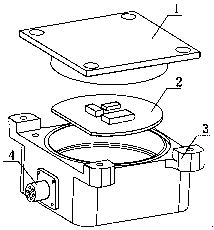
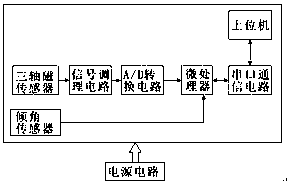
[0054] Embodiment 1: see Figure 1 to Figure 6, a method for correcting an electronic compass, comprising an electronic compass, the electronic compass comprising a housing body, a cover plate and a circuit unit located in the housing body, the circuit unit comprising a data acquisition circuit, a microprocessor, a serial port communication circuit and a power supply circuit , the data acquisition circuit includes a three-axis magnetic sensor and an inclination sensor, the three-axis magnetic sensor is used to obtain the earth's three-axis geomagnetic field value of the current environment, and sends it to the microprocessor after the signal conditioning circuit and the A / D conversion circuit Among them, the inclination sensor is used to obtain the earth’s gravitational acceleration value in the current environment, and convert it into an inclination value and send it to the microprocessor. The serial port of the microprocessor is connected to the serial port communication circ...
Embodiment 2
[0089] Embodiment 2: In the prior art, the electronic compass has an internal autonomous correction mode instruction. Before solving the azimuth angle, first add a part of judgment. The upper computer inputs the command "whether correction is required". Calibration, enter the internal self-calibration mode command:
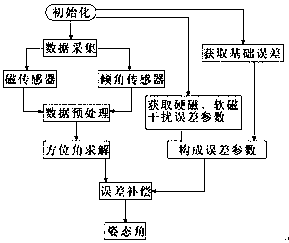
[0090] It is necessary to keep the product attitude angle less than 15° and slowly rotate, and the rotation range exceeds 360° to achieve product calibration; during this period, the calibration program embedded in the microprocessor is used to execute the program of collecting sensor data. The collected data mainly includes "after data preprocessing "The magnetic field data and inclination angle data in the link, when the number of collected points is sufficient, the error parameters are solved and stored through the embedded correction algorithm processing and correction parameter solving process; then continue to run the azimuth angle solving, error compensatio...
Embodiment 3
[0099] Embodiment 3: see Figure 7 , It can be seen from Embodiment 2 that there is a major defect here, that is, the carrier cannot be rotated after installation, and the internal calibration procedure cannot be realized.
[0100]At this time, before solving the azimuth angle, first add the first judgment, the upper computer inputs the command "whether correction is required", after the microprocessor receives it, if no correction is required, directly use the pre-stored error parameters combined with the azimuth angle solution to solve the attitude Angle information, if it needs to be corrected, enter the next judgment, whether to correct by external auxiliary correction mode command or internal self-correction mode command, we set the external auxiliary correction mode command as mode 1, and the internal self-correction mode command as mode 2, if adopt Mode 1 is used for correction, see Example 1 for the specific method, and if Mode 2 is used for correction, see Example 2.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More