Unmanned aerial vehicle GPS location fault detection and reconstruction method based on distance measurement between vehicles
A GPS positioning and fault detection technology, which is applied in satellite radio beacon positioning systems, measuring devices, radio wave measuring systems, etc., can solve the problems of not making full use of multi-machine cooperative anti-interference, diagnosis and positioning faults, etc., and achieve good application value , the effect of improving reliability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0029] The present invention establishes an algebraic graph theory model based on mutual ranging for multi-UAV systems; in a multi-machine network, each UAV can be regarded as a node, and UAVs and UAVs Inter-communication can be seen as edges connecting nodes.
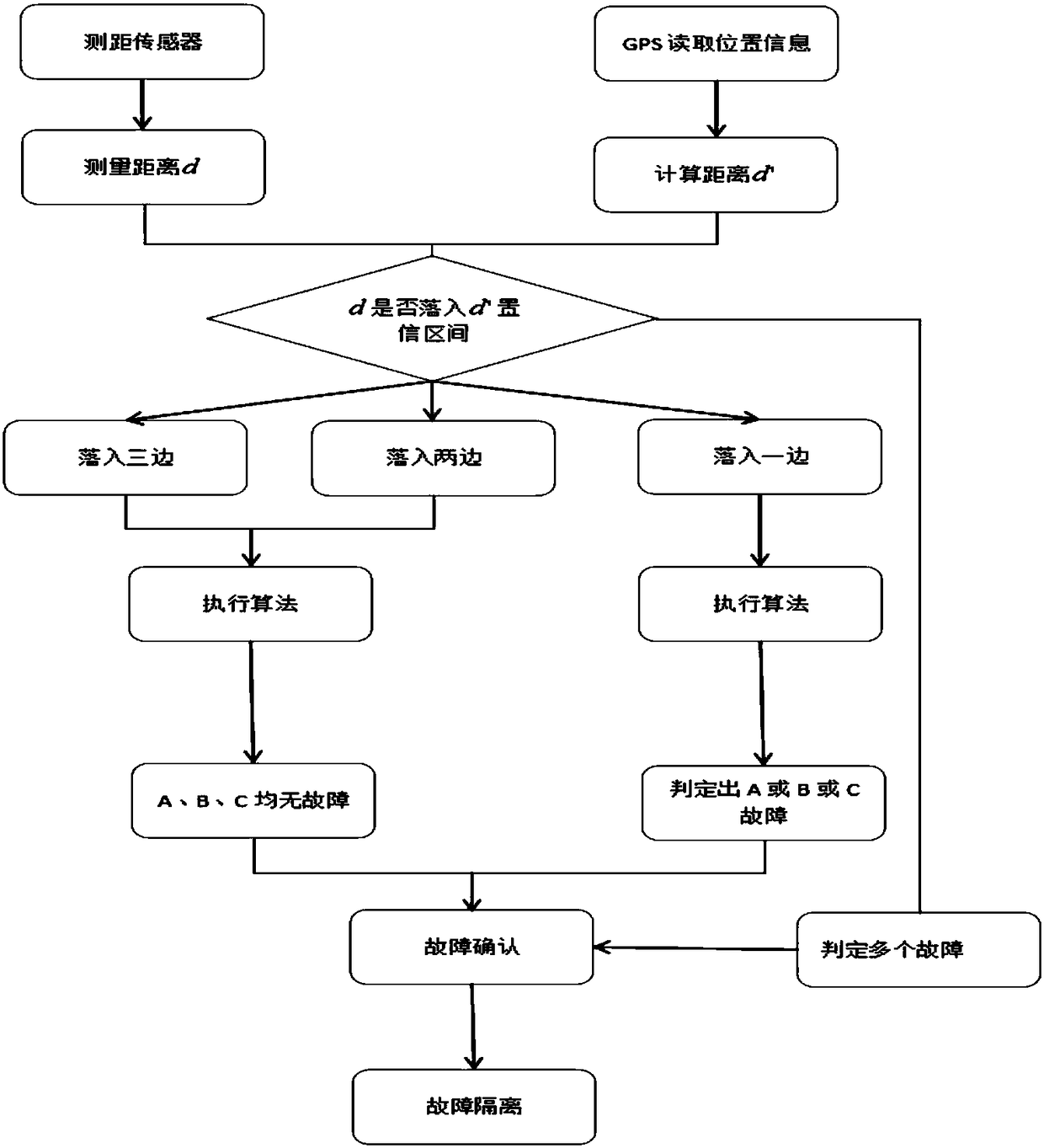
[0030] With the location data provided by the GPS positioning system, we can first obtain the GPS location information of each drone. Of course, the GPS itself has errors, so the location information we get is not the real UAV location information, but the location information with GPS errors. Now we consider two adjacent frames, let (x 1 ',y 1 ') and (x 2 ',y 2 ') is the position information with GPS errors obtained by two adjacent drones. Then it can be concluded that the distance between the two drones is: For the convenience of the following description, we call it the calculation distance, denoted by d'. Since each UAV is equipped with a ranging sensor (such as a radio ranging sensor, etc.), then we can dir...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More