

Underwater DOA Estimation Method and Device Based on Angle Adjustable Non-uniform Linear Array
A technology of direction of arrival estimation and uniform linear array, which is applied to systems for determining direction or offset, direction finders using ultrasonic/sonic/infrasonic waves, etc. The effect of high accuracy and improved angular resolution
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
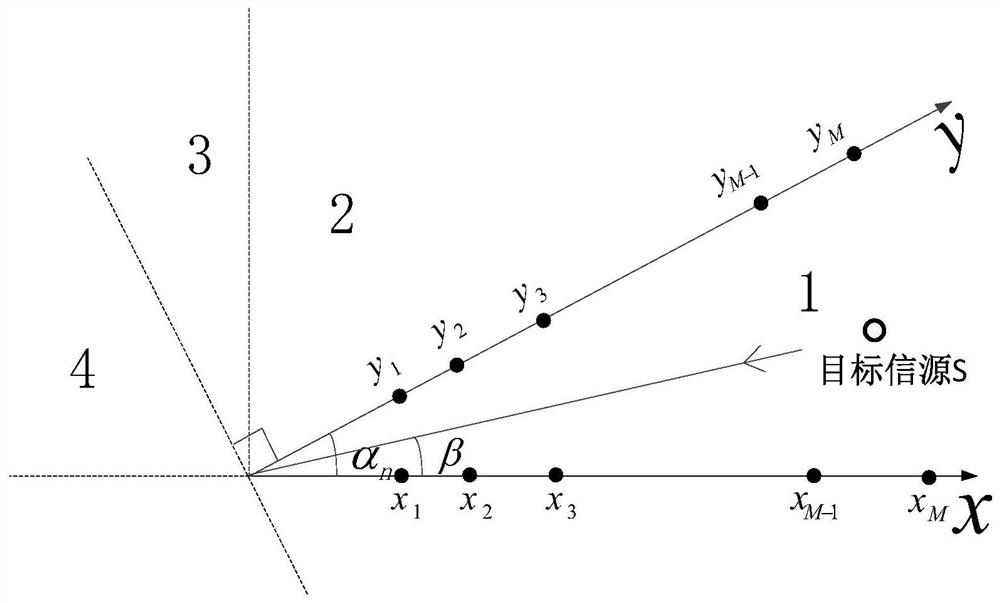
[0074] The invention adopts two non-uniform line arrays with adjustable included angles, the narrow-band target sound source is S, and the center frequency is f. The included angle between the incident direction of the sound wave and the positive axis direction of the horizontal non-uniform linear array is β, β∈(0, π); the method of the present invention will measure N different linear array included angle values α n ,n=1,2,...,N and α n ∈(0,π / 2), the specific steps are as follows:
[0075] Step 1: Establish a signal receiving model of an adjustable non-uniform line array. Such as figure 1 As shown, two angles are placed in water with an angle of α n The non-uniform line array of , a non-uniform line array in the horizontal direction and a non-uniform line array in the inclined direction are respectively set as x-axis and y-axis. Both non-uniform linear arrays have M receiving array elements, and the positions of the first to m-th array elements of the horizontal non-uni...
Embodiment 2
[0151] The underwater direction-of-arrival estimation device based on the adjustable non-uniform linear array provided by the present invention includes a data processing and control module, a transmitting module, a receiving module, an output module and a power supply module, such as Figure 10 with Figure 11 shown.
[0152]The data processing and control module is composed of a pair of A / D, D / A converter and a processor, which is the core part of the whole device, and all other modules are directly connected with it. It can control the transmitting module to make the transmitting module emit the specified signal; control the angle-adjustable linear array of the receiving module so that the angle between the two non-uniform linear arrays can be turned to the set value; it can also control the signal transmitted by the receiving module Processing, the direction of arrival angle is calculated by the method of the present invention, and then the result is transmitted to the ou...
Embodiment 3
[0159] The device of the invention includes a data processing and control module, a transmitting module, a receiving module, an output module and a power supply module. The data processing and control module can be implemented with a DSP chip (for example: DSP chip of TI company TMS320VC5509A type), this DSP chip can realize the functions of A / D conversion and D / A conversion, and can realize the rotation operator of non-uniform linear array And the calculation of the final direction of arrival; the stepping motor in the receiving module adopts Toshiba's 23HY6606-CP motor, the step angle of this stepping motor is 1.8 degrees, and the stepping motor drive circuit adopts Toshiba's TC78S600FTG chip . In addition, the receiving module also uses two non-uniform linear arrays with adjustable angles, each of which includes multiple ultrasonic receiving probes, and the number is the same, and the two non-uniform arrays are divided by Figure 12 Assembled as shown; the transmitting mod...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More