Road edge detection method based on laser radar and camera
A technology of laser radar and detection method, which is applied in the field of intelligent transportation, to achieve the effect of overcoming the huge point cloud data, improving detection accuracy and real-time detection
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0040] Hereinafter, the preferred embodiments of the present invention will be described in detail with reference to the accompanying drawings.
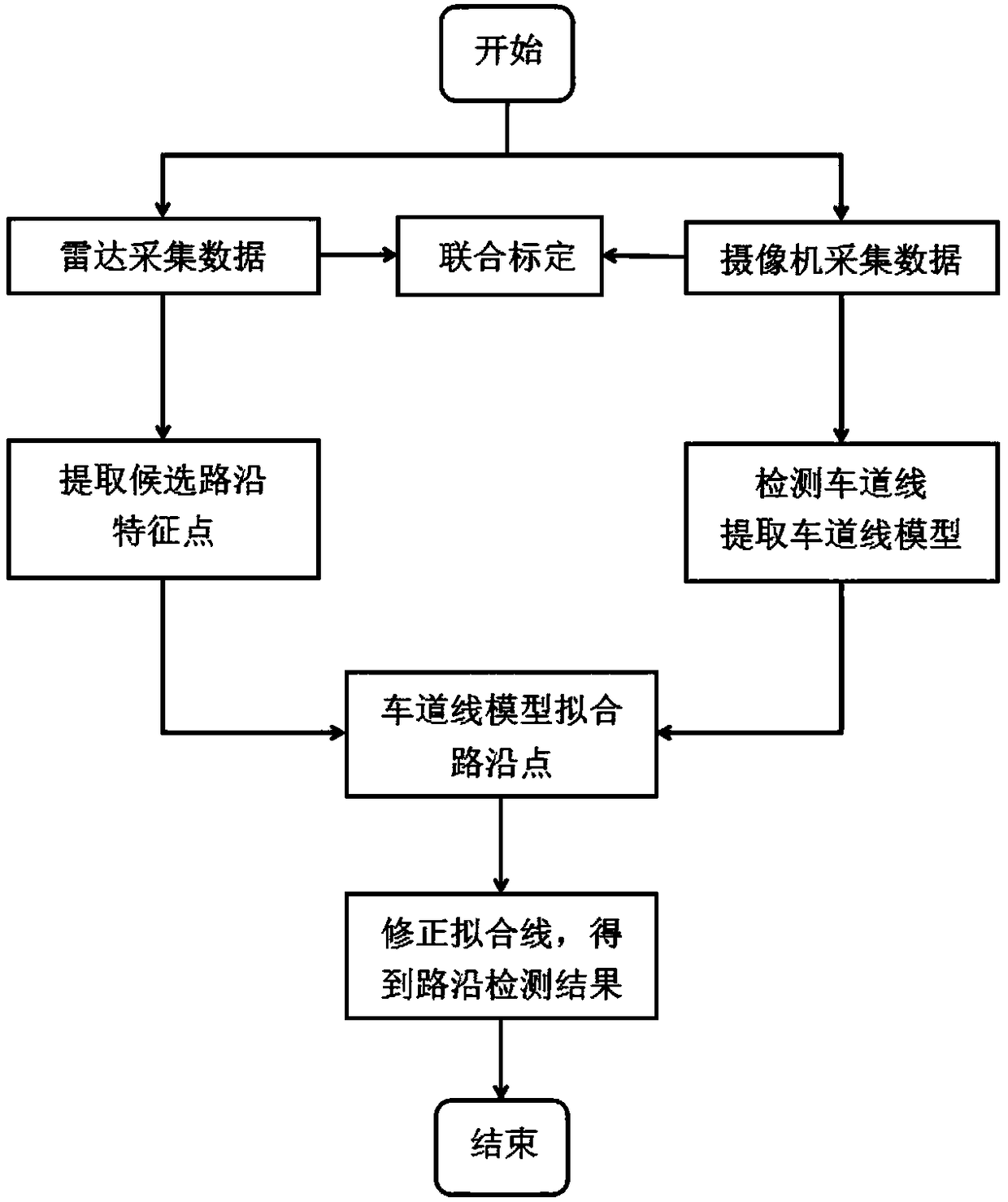
[0041] In this embodiment, the IBEO-LUX 2010 four-line lidar is used as the radar point cloud data acquisition sensor, and the low-light camera is used as the image data acquisition sensor, and an algorithm is written in the VS2013 environment to implement a roadside detection method in an unmanned vehicle. The specific implementation is as figure 1 As shown, including the following steps:
[0042] Step 1. Use lidar to obtain roadside point cloud data, and use a camera to obtain road image data; the radar point cloud data includes a plurality of scan points containing polar coordinate information; the image data includes images of lane lines and roadsides;
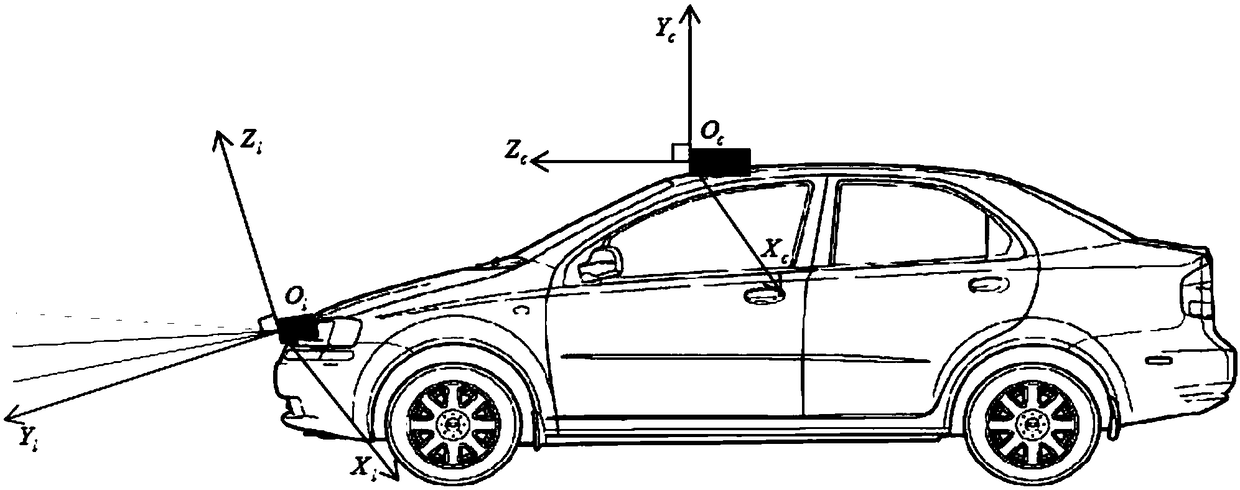
[0043] Step 2: Preprocess the radar data and camera data separately, and perform joint calibration;
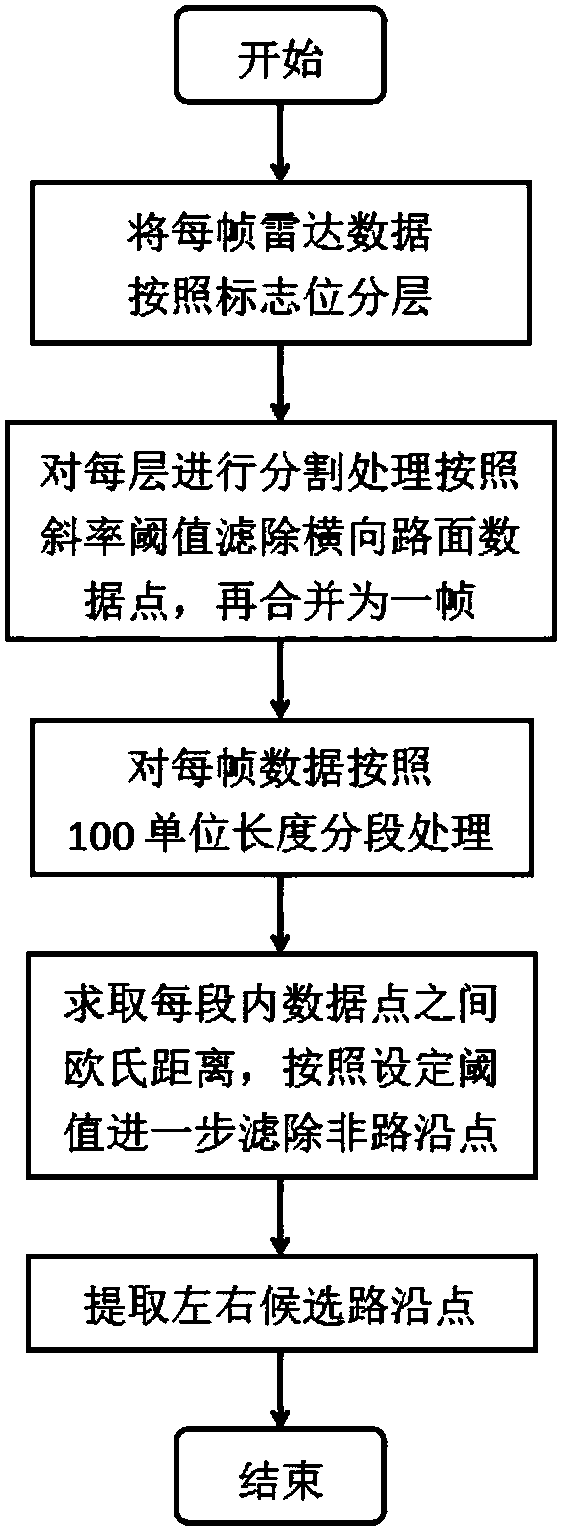
[0044] Step 3: Process each frame of radar point cloud data. For each layer of scan ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More