

Generation method, apparatus and terminal of disparity map
A disparity map and difference map technology, applied in image enhancement, image analysis, image data processing, etc., can solve the problems of wasting computing resources, reducing the efficiency of stereo matching algorithms, etc., and achieve the effect of improving efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
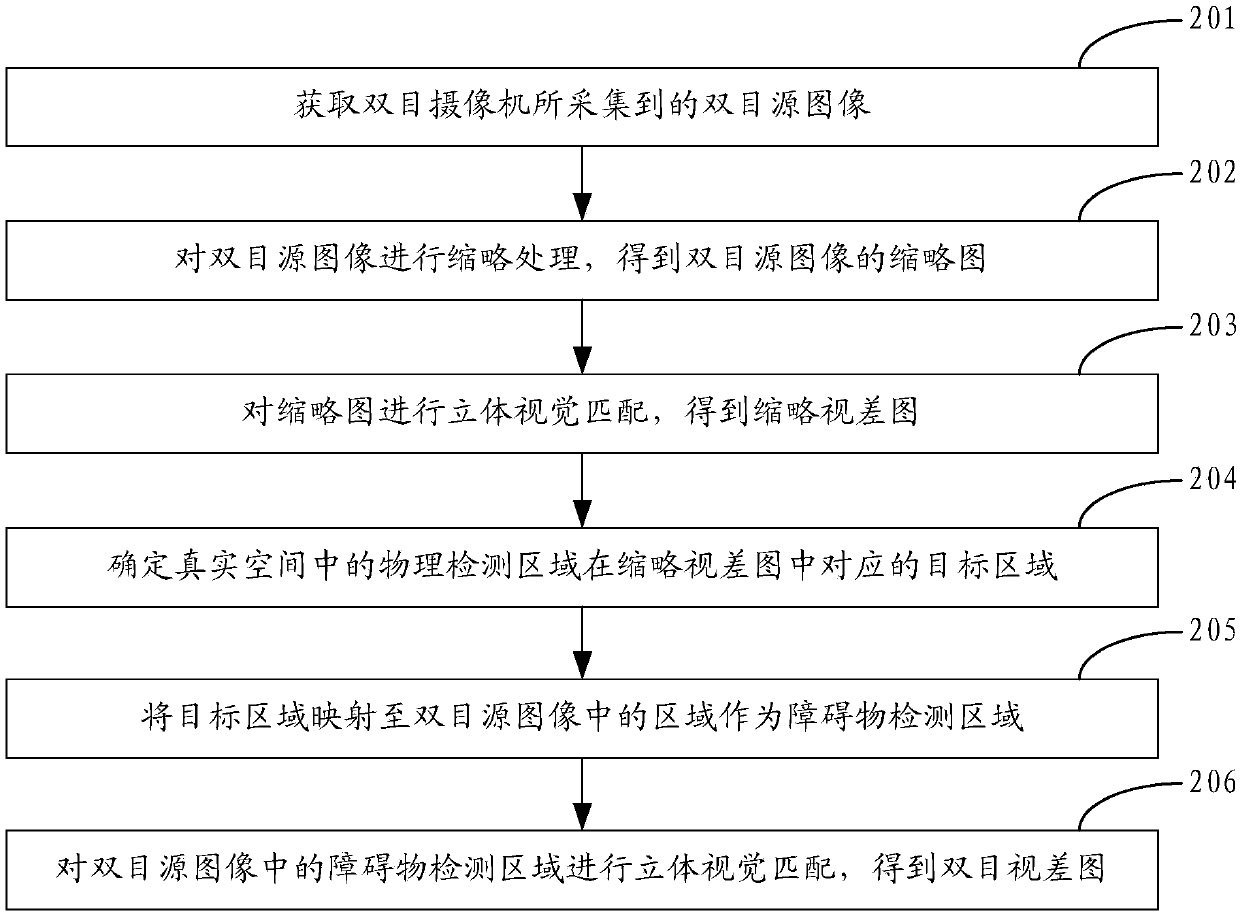
[0078] See figure 2 , is a flow chart of an embodiment of a method for generating a disparity map provided in an exemplary embodiment of the present application, and the method may include the following steps:
[0079] Step 201: Obtain a binocular source image captured by a binocular camera.
[0080] Those skilled in the art can understand that, in order to realize the method for generating the disparity map provided by the embodiment of the present application, a binocular camera can be arranged on the vehicle. The binocular camera has two cameras on the left and right. During an image acquisition process, the The left and right cameras capture an image respectively. For the convenience of description, in the embodiment of the present application, the two images captured by the two cameras of the binocular camera are collectively referred to as binocular source images.
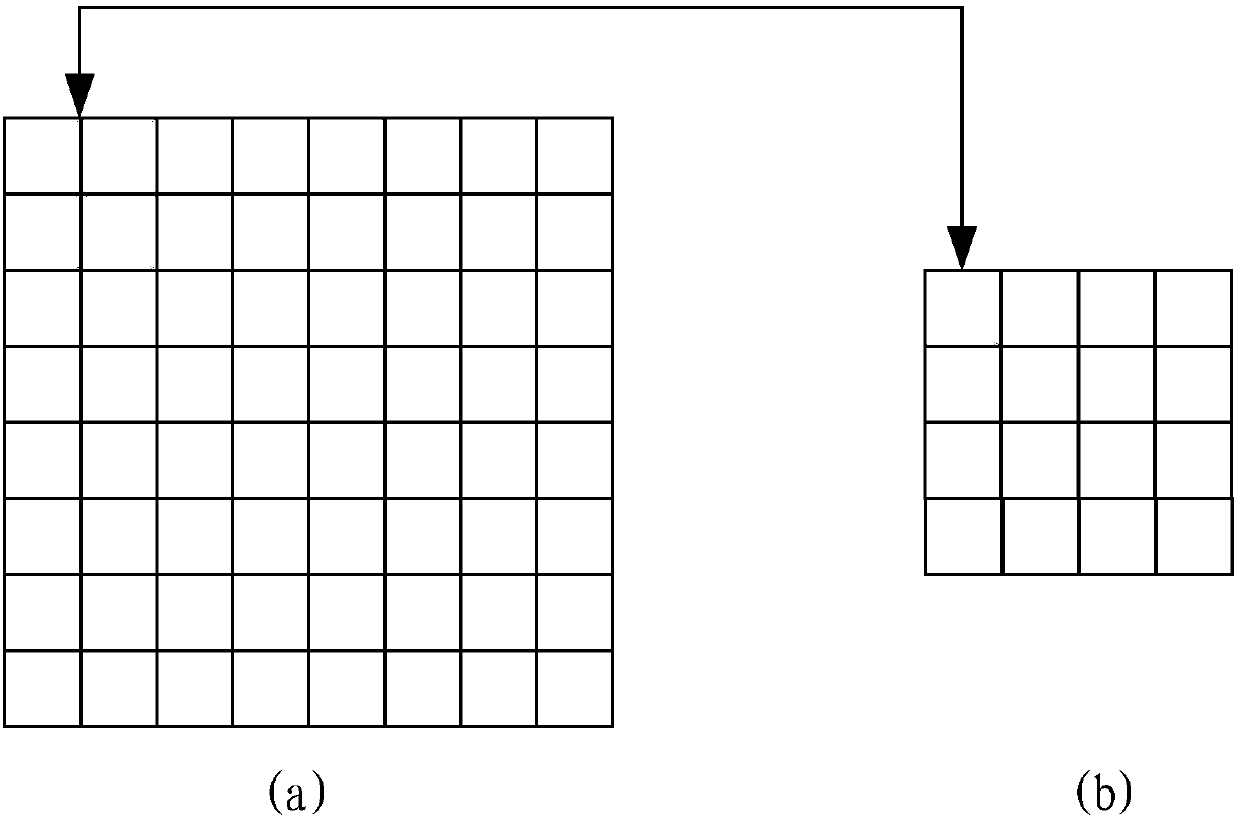
[0081] Step 202: Perform thumbnail processing on the binocular source image to obtain a thumbnail of the...
Embodiment 2
[0096] See Figure 4 , is a flow chart of another embodiment of a method for generating a disparity map provided in an exemplary embodiment of the present application, and the method may include the following steps:
[0097] Step 401: Calculate the X-axis coordinates and Y-axis coordinates of the disparity points in the thumbnail disparity map in the preset three-dimensional coordinate system.
[0098] In the embodiment of the present application, the horizontal midpoint between the two imaging planes in the binocular camera can be used as the origin, the positive direction of the Z-axis is pointed parallel to the ground and directly in front of the front of the vehicle, and the Y-axis is perpendicular to the ground and pointed below the ground Positive direction, pointing to the right side of the driver parallel to the ground as the positive direction of the X-axis, establish a three-dimensional coordinate system, such as Figure 5 Shown is an example of a three-dimensional co...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More