

UWB (Ultra-wide Bandwidth)-based communication and positioning method and integrated system for multi-uavs close formation flight
A formation flight and positioning method technology, applied in the field of integrated systems, can solve problems such as large noise interference, poor system stability, and easy interference by light sources
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0038] The present invention will be further described in detail below in conjunction with the accompanying drawings and specific embodiments.
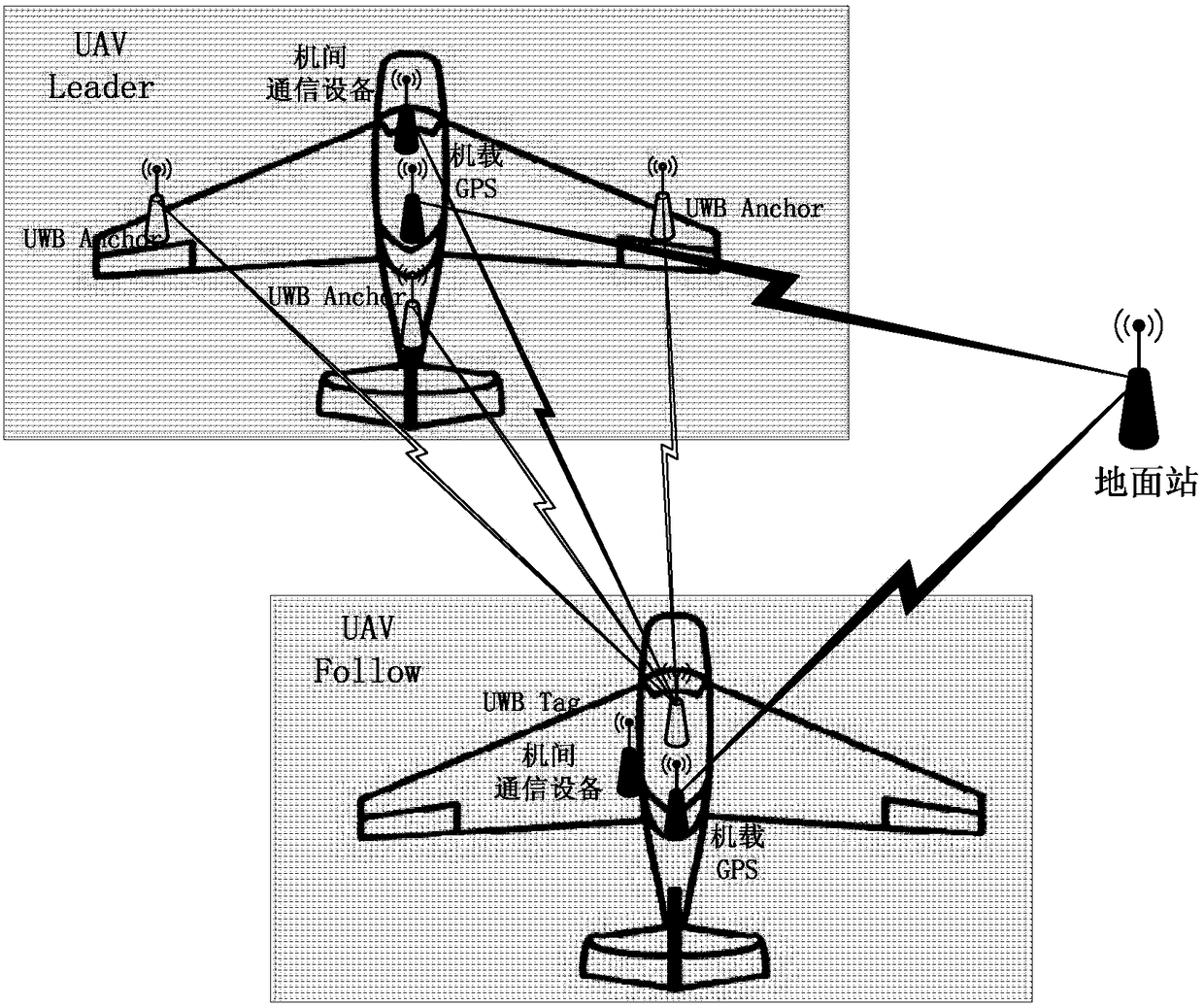
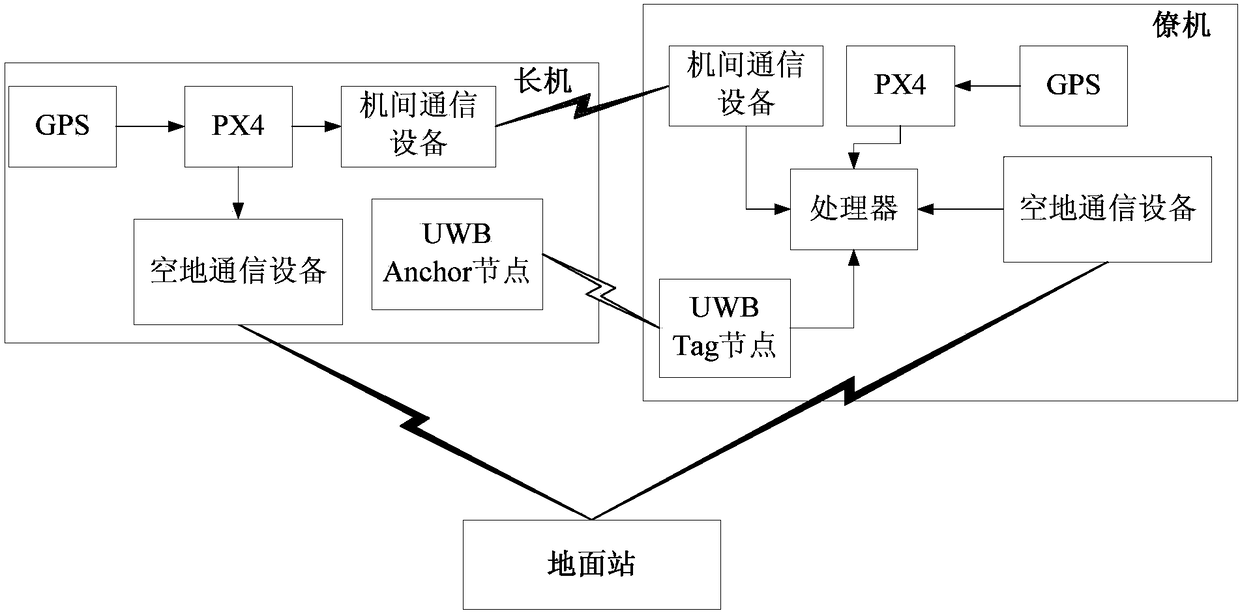
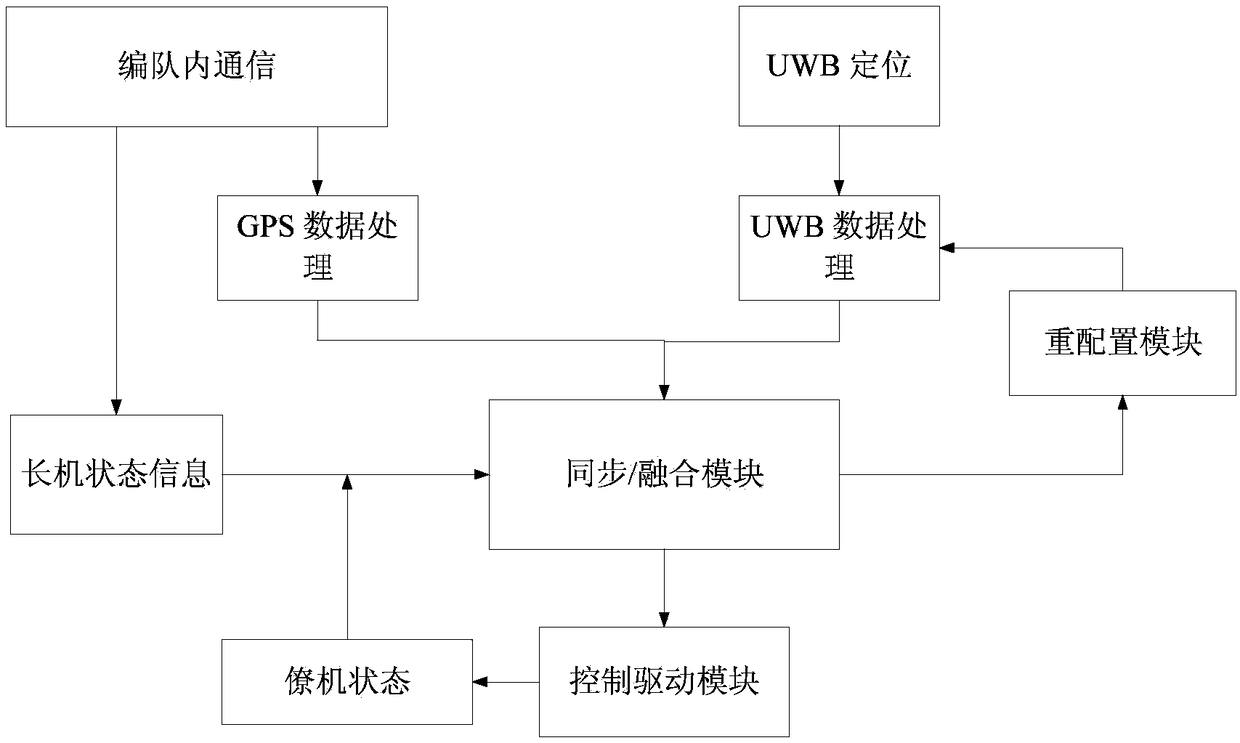
[0039] Such as Figure 1-Figure 6 As shown, the multi-aircraft close formation flight of the present invention is based on the UWB communication and positioning method. In the "leader-wingman" formation, the lead plane flies according to the set route, and the wingman autonomously "follows" the lead plane to complete the formation; Install GPS and UWB nodes on the lead plane to complete positioning, flight control modules to complete flight control, inter-machine communication equipment to complete station communication and inter-machine communication, and install processor modules on wingmen to implement formation control algorithms. During the formation process, the GPS module guides the wingman to approach the lead plane, and when the relative distance between the planes reaches the effective working distance of UWB, UWB data is in...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More