

Focusing Method of Moving Target Based on Keystone Transformation and Integral Quadratic Function
A moving target and quadratic function technology, applied in the radar field, can solve problems affecting the focusing performance of the final moving target, and achieve the effects of improving focusing imaging performance, suppressing defocus, and improving performance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0023] Ground moving targets inevitably exist in the radar detection scene. Radar is of great significance to the detection of ground moving targets. In this way, the moving targets in the ground hotspots can be observed, and the information of the moving targets can be obtained. Due to the movement characteristics of the moving target, the energy diffuses in the distance and Doppler dimension. In order to better observe the moving target, it is necessary to focus on the energy of the moving target. The existing focusing methods often do not consider the maneuvering of the moving target. characteristics, only consider the uniform motion, and only compensate for the low-order range migration and Doppler migration of the moving target, while ignoring the high-order range migration and Doppler migration of the moving target. At the same time, the use of search compensation for Doppler center ambiguity targets cannot better solve the energy defocus of moving targets caused by Dop...
Embodiment 2
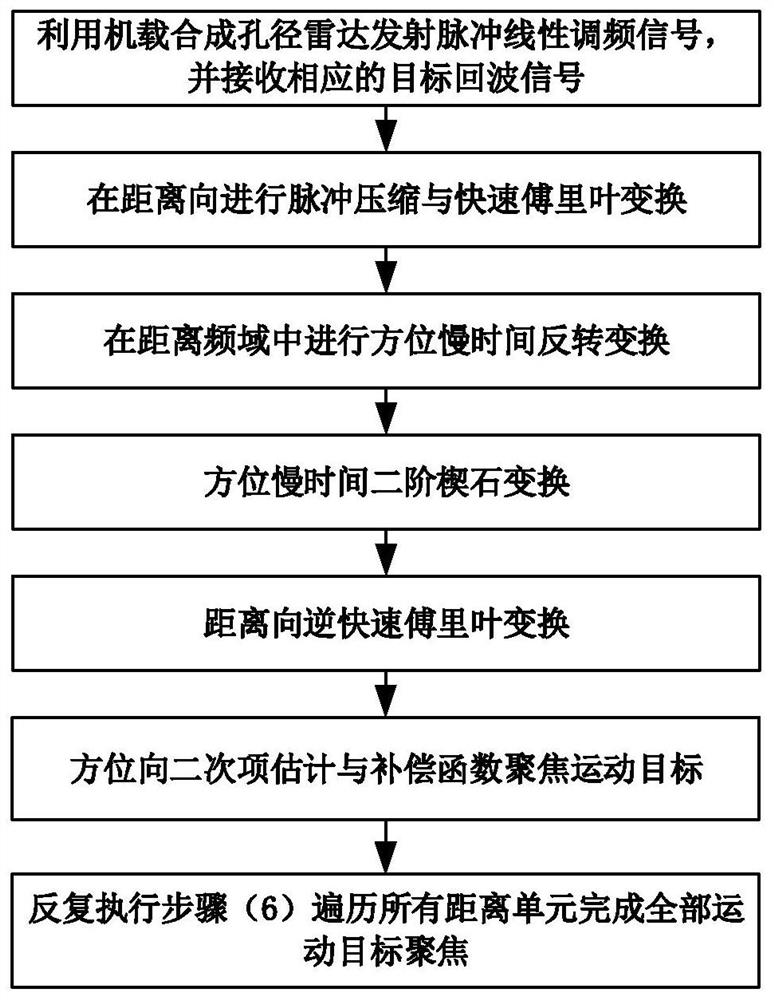
[0033] The moving target focusing method based on keystone transformation and integral quadratic function is the same as embodiment 1, wherein in the step (3), the azimuth slow time reversal transformation is carried out in the distance frequency domain, specifically including the following steps:
[0034] 3a) Obtain the radar echo signal s in the range frequency domain and azimuth slow time domain for step 2 1 (f,t m ) to perform azimuth slow time reversal to obtain the radar echo signal after range frequency domain and azimuth slow time reversal Its specific calculation expression is:
[0035]
[0036] in: Represents the time series inversion operation, f represents the distance frequency variable, t m Indicates the azimuth slow time variable, m indicates the azimuth pulse number, rect(·) indicates the rectangular window function, B indicates the transmitted signal bandwidth, w a (t m ) represents the azimuth slow time window function, c represents the speed of lig...
Embodiment 3
[0041] The moving target focusing method based on keystone transformation and integral quadratic function is the same as embodiment 1-2, wherein step (6) estimation and compensation of quadratic term in azimuth direction specifically includes the following steps:
[0042] 6a) Extract the echo signal of the moving target: extract the echo signal s of the moving target in the nth distance unit in the fast time of range and slow time of azimuth 2KT (R 0n , η m ):
[0043]
[0044] where: R 0n Indicates the nth distance unit, η m Indicates the azimuth slow time variable after keystone transformation, a 2n Represents the second-order item coefficient of the moving target distance model in the nth distance unit, n=1, 2,..., N represents the sequence number of the distance unit, and N represents the total number of distance units;
[0045] 6b) Calculate the integral quadratic function value: set the search range u=(-k,-k+Δk,...k-Δk,k) of the second-order coefficient of the ta...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More