

A tactile glove based on conversion of pressure and electrical stimulation
A technology of electrical stimulation and pressure, applied in the field of remote control of bionic manipulators, can solve the problem that mechanical tactile gloves cannot accurately feedback the force information and tactile information of the manipulator, and achieve the effect of improving the accuracy of remote control
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
[0028] Embodiment: combine below Figure 1 to Figure 4 This embodiment will be described in detail.
[0029] The tactile glove based on pressure and electrical stimulation conversion described in this embodiment is used to assist remote control of bionic manipulators;
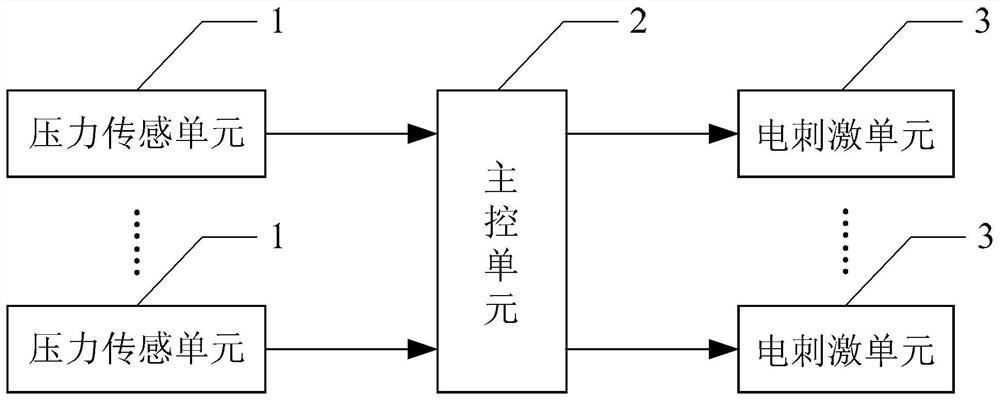
[0030] The tactile glove includes a glove body, a plurality of pressure sensing units 1, a main control unit 2 and a plurality of electrical stimulation units 3;
[0031] The pressure sensing unit 1 includes a pressure sensitive element;
[0032] Multiple pressure sensitive elements are evenly distributed on the surface of the bionic manipulator;
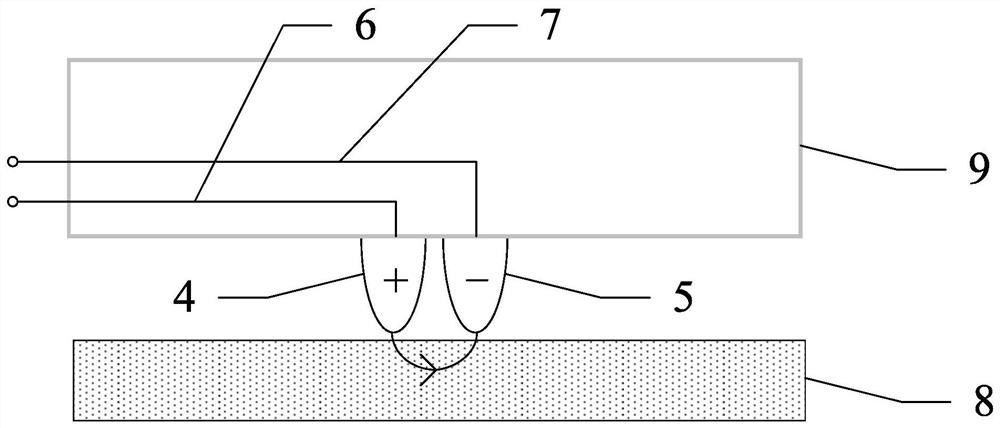
[0033] A plurality of electrical stimulation units 3 are evenly distributed on the lining of the glove body;
[0034] The positions of multiple pressure sensitive elements on the surface of the bionic mechanical watch correspond to the positions of multiple electrical stimulation units 3 on the lining of the glove body;
[0035] The pressure sensing unit 1 is use...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More