

Positioning device and method on basis of inertia and visual features, and robot
A positioning device and visual feature technology, applied in the field of positioning devices based on inertial data and visual features, can solve the problems of camera lens collision, increased camera angle, easy blocking of the camera, etc., so as to improve positioning accuracy, improve navigation efficiency, The effect of shortening the feature search time
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0031] The specific embodiment of the present invention will be further described below in conjunction with accompanying drawing:
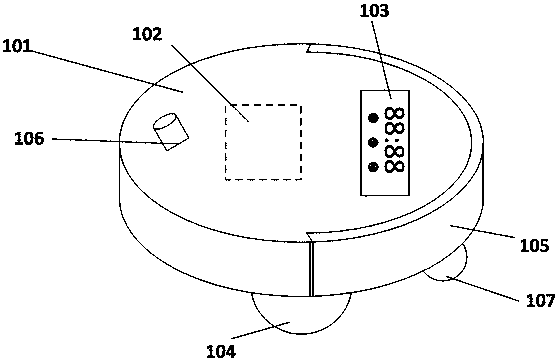
[0032] A positioning device based on inertial data and visual features in the embodiment of the present invention is implemented in the form of a robot, including mobile robots such as sweeping robots and AGVs. It is assumed below that the obstacle avoidance device is installed on the sweeping robot. However, those skilled in the art will appreciate that the configurations according to the embodiments of the present invention can be extended to be applied to mobile terminals, in addition to being used specifically for mobile robots.
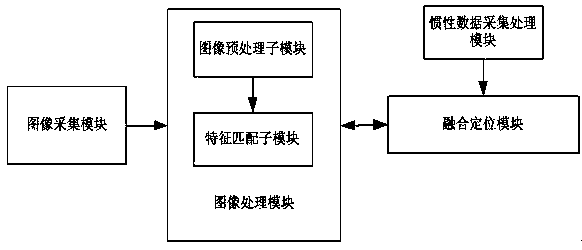
[0033] The present invention provides a positioning device based on inertial data and visual features, the visual positioning device is a movable visual positioning device, such as figure 1 As shown, it includes an image acquisition module, an image processing module, an inertial data acquisition module and a fusion...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More