

Self-adaptive speed planning method and system
A speed planning and self-adaptive technology, applied in general control systems, control/regulation systems, instruments, etc., can solve the problem of not being able to exert the actual movement ability of the motion platform, and achieve the effect of improving efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0044] In order to make the object, technical solution and advantages of the present invention clearer, the present invention will be further described in detail below in conjunction with the accompanying drawings and embodiments. It should be understood that the specific embodiments described here are only used to explain the present invention, not to limit the present invention.
[0045] The adaptive speed planning method of the present invention is executed by a controller that controls the operation of a motion platform (such as an industrial robot, a machine tool, or a multi-axis linkage mechanical device, and an industrial robot is used as an example below). When the motion platform is running, smooth speed is required. Instantiated as acceleration continuous and jerk bounded.
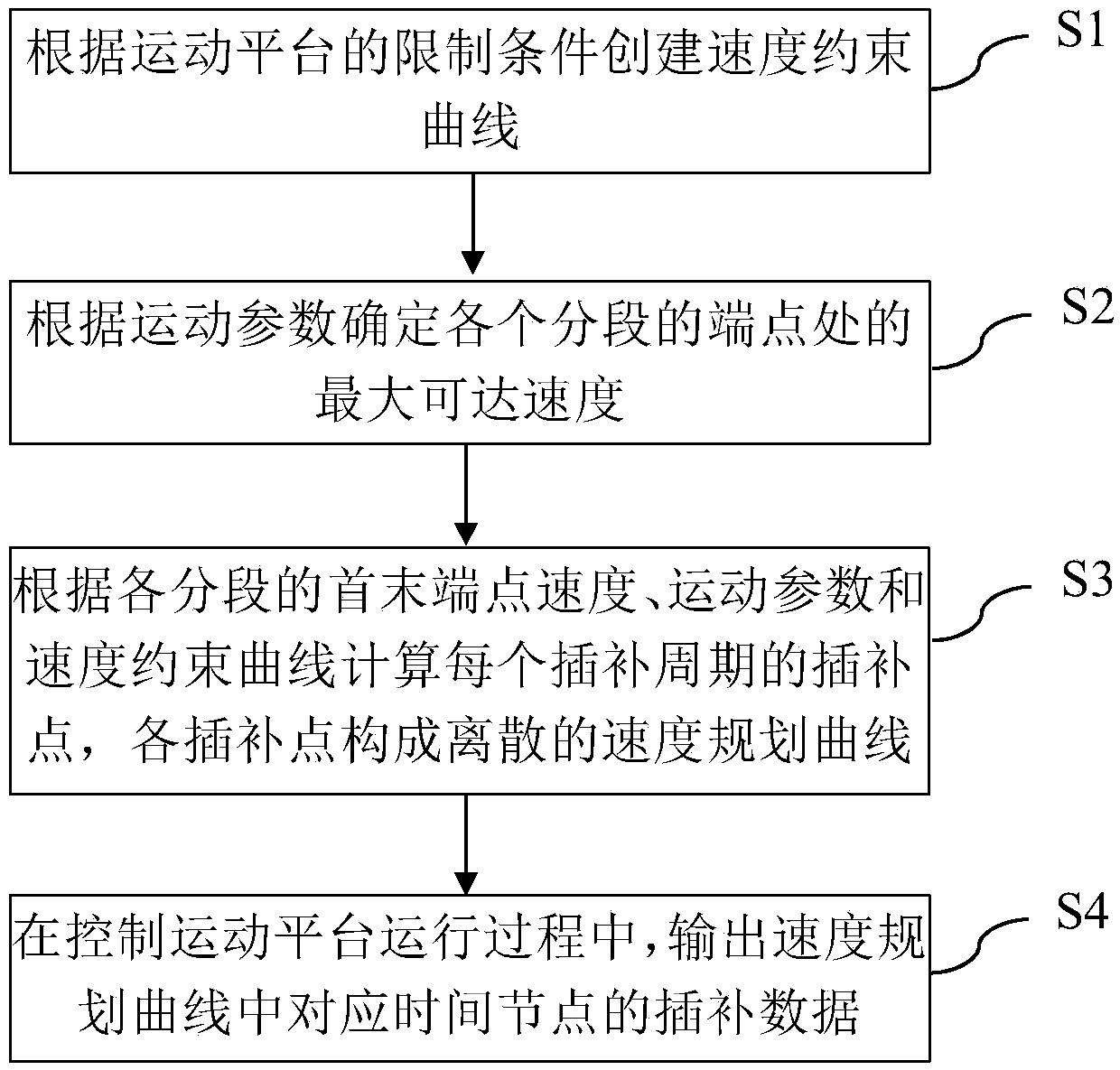
[0046] Such as figure 1 As shown, the adaptive speed planning method of the present invention comprises the following steps:
[0047] Step S1: Create a velocity constraint curve according to th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More