Portable wearable robot for exoskeletons of lower limbs
An exoskeleton robot, portable technology, applied in passive exercise equipment, equipment to help people walk, physical therapy and other directions, can solve the problems of complex structure, inability to support autonomously, inconvenient to wear, etc., and achieve easy independent control and convenience in daily life. Carrying and transporting, the effect of simple structure design
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0023] In order to illustrate the technical scheme and technical purpose of the present invention, the present invention will be further introduced below in conjunction with the accompanying drawings and specific embodiments.
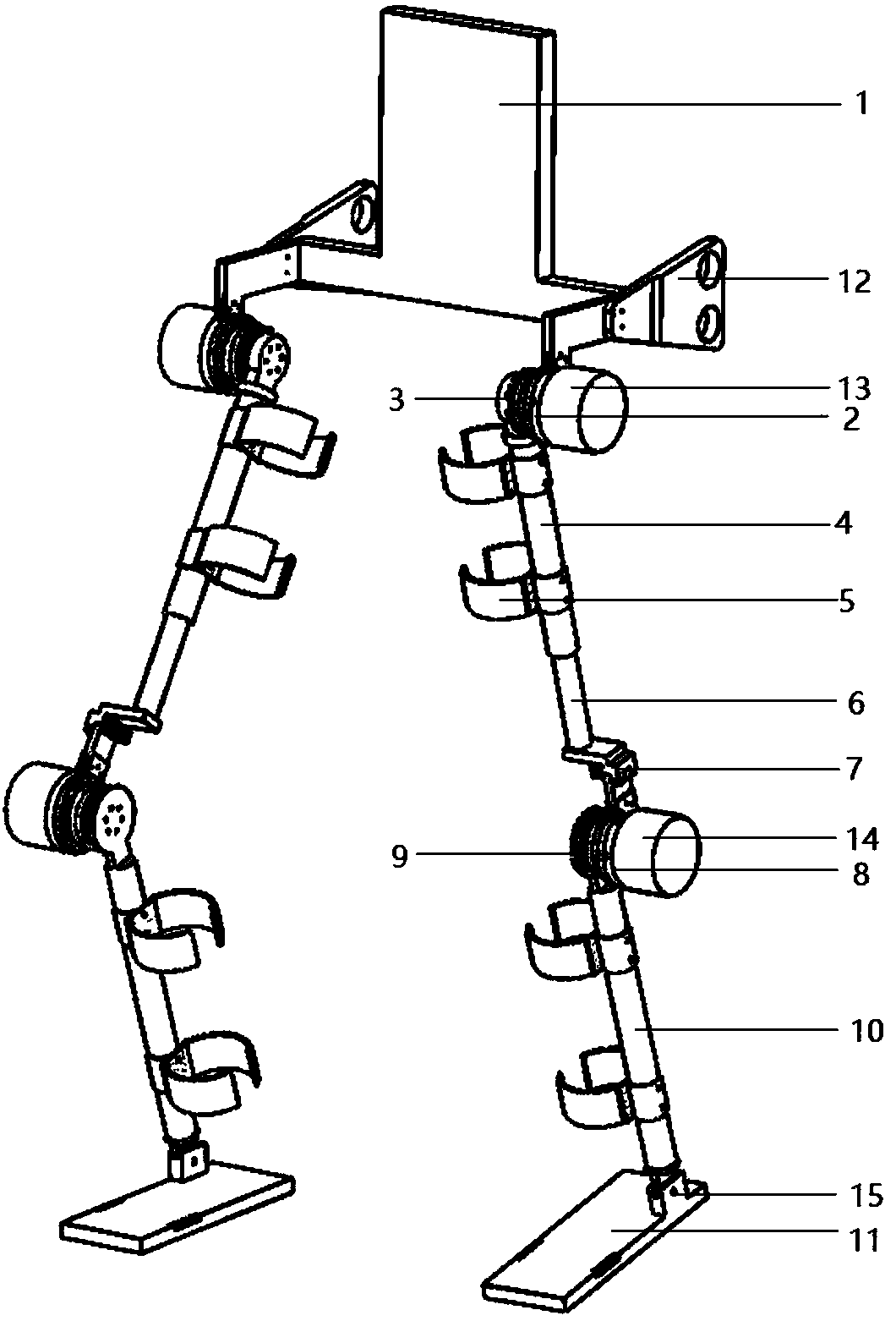
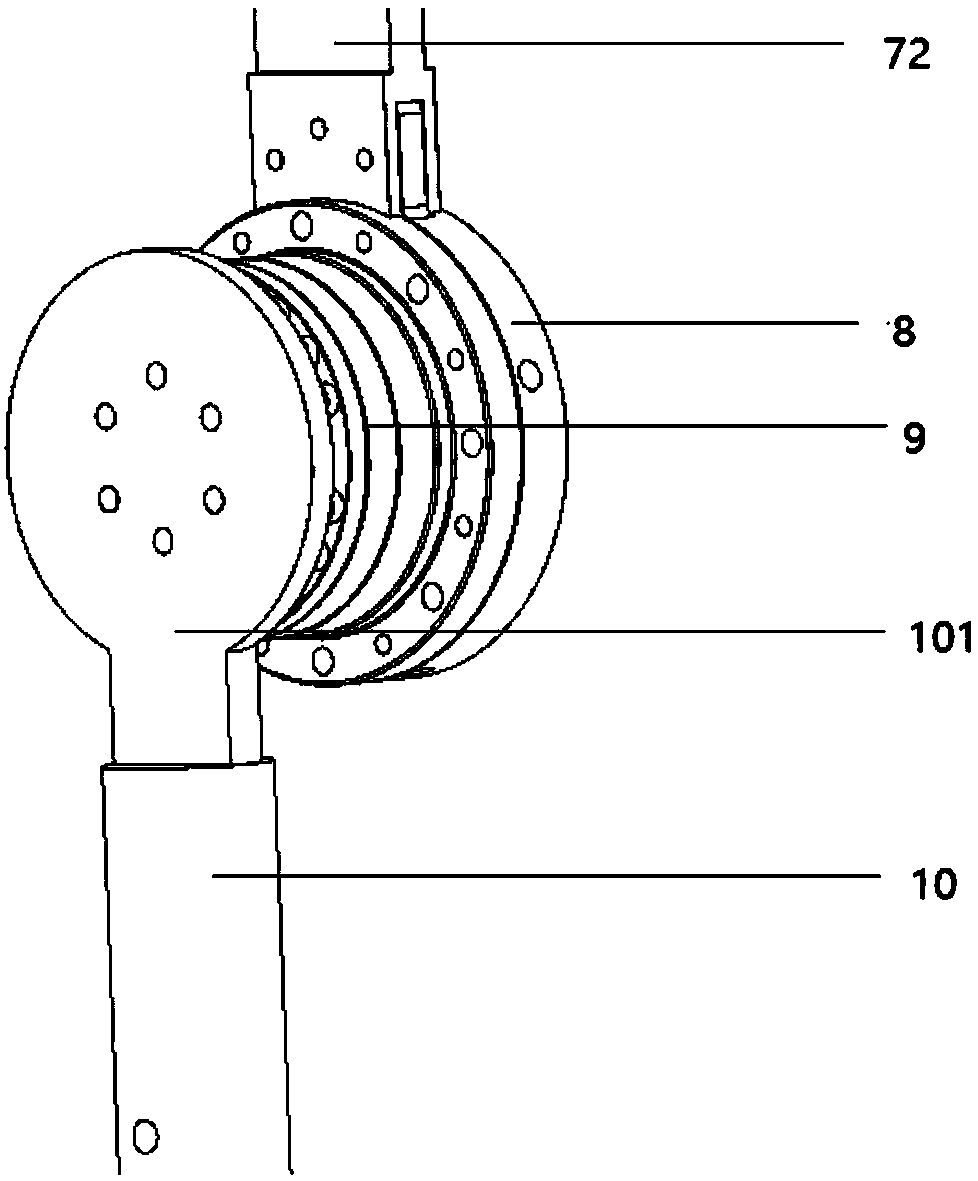
[0024] combine Figure 1-Figure 3 , a portable wearable lower limb exoskeleton robot of the present invention, comprising a waist support plate 1, a hip joint assembly, a thigh support bar 4, a knee joint assembly, a calf support bar 10, and a sole support plate 11;
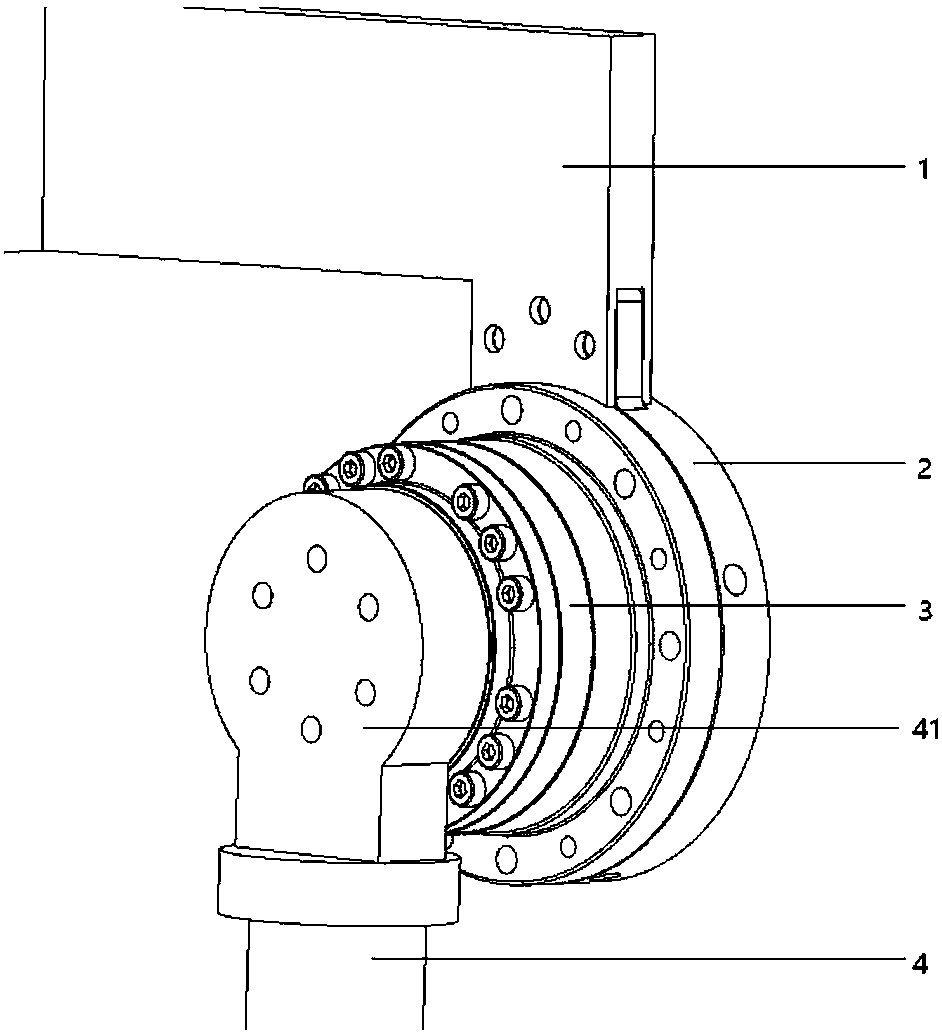
[0025] The hip joint assembly includes a first drive motor 14, a first flange 2, and a first reducer 3; the first flange 2 is symmetrically connected to both sides of the lower end of the support plate 1; the lumbar support plate 1 and The first flange 2 is fixed; the first drive motor 14 is fixed to the outer end surface of the first flange 2; the first drive motor 14 is connected to the first reducer 3; the first reducer 3 fixed in the first flange 2; the upper end of the thigh support ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com