

A bionic motion control method of a wheel-legged compound robot based on cpg
A motion control and robotics technology, applied in motor vehicles, adaptive control, general control systems, etc., can solve problems such as low efficiency, complex calculation, lack of real-time performance and environmental adaptability, and achieve simple calculation, convenient control, and environmental The effect of adaptability and robustness improvement
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0034] The present invention will be further described in detail below in conjunction with the accompanying drawings and specific preferred embodiments.
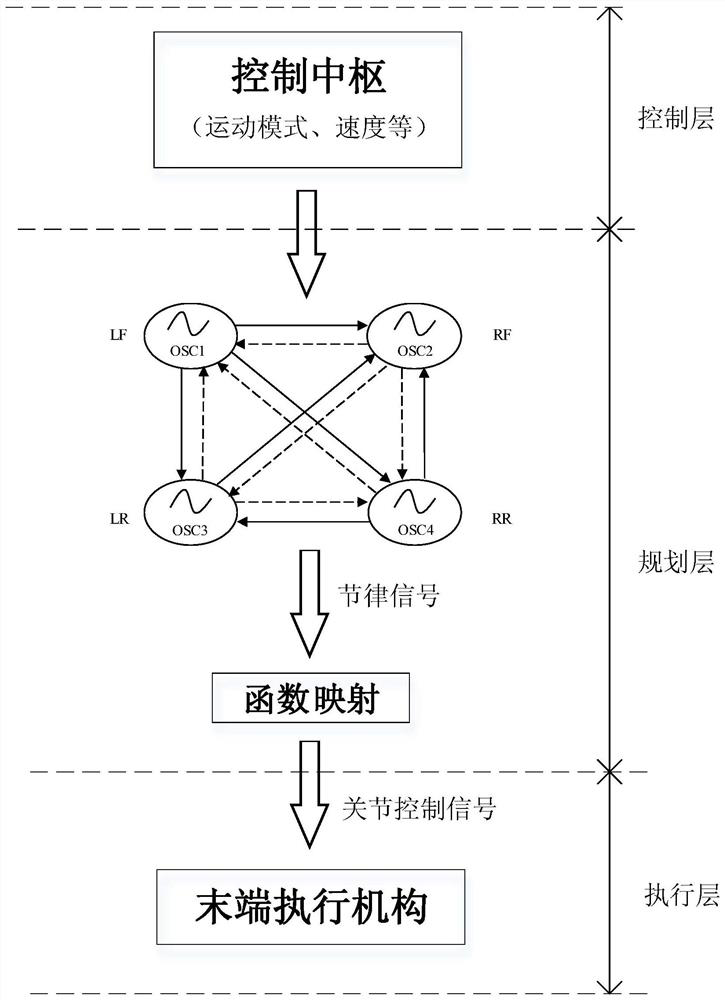
[0035] Such as figure 1 As shown, a bionic motion control method of a CPG-based wheel-leg compound robot includes the following steps.
[0036] Step 1, CPG network model establishment, planning layer.
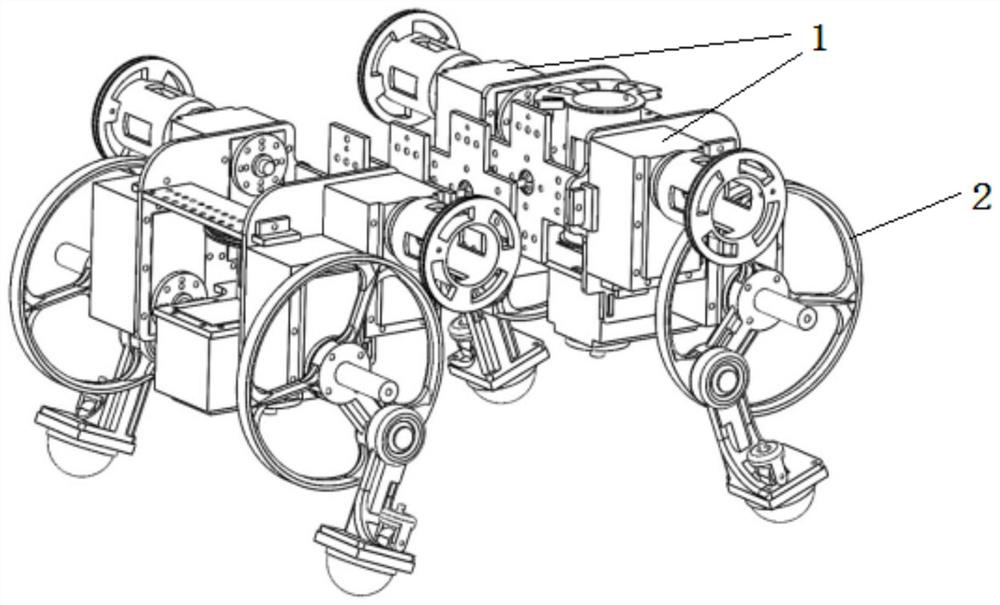
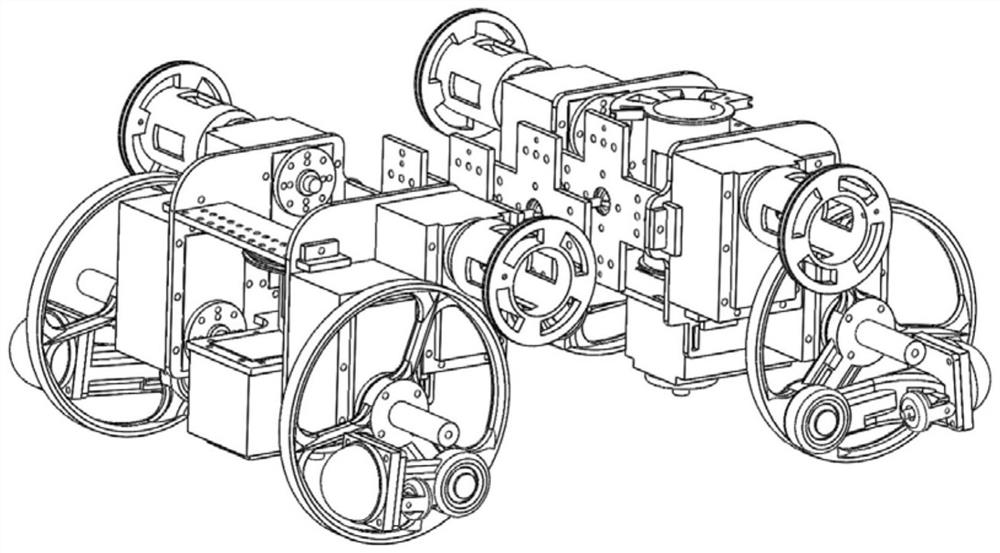
[0037] Such as figure 2 and image 3 As shown, the wheel-leg compound robot has four wheel-leg mechanisms, and its specific structure is as described in CN201610048470.4, which will not be repeated here.
[0038] Each wheel-leg mechanism is connected to a CPG oscillator, each CPG oscillator is preferably a Kuramoto phase oscillator, and the CPG network is preferably a Kuramoto model.
[0039] exist figure 1 Among them, LF, RF, LR and RR denote the left front wheel-leg mechanism, right front wheel-leg mechanism, left rear wheel-leg mechanism and right rear wheel-leg mechanism. The four CPG oscillators corresponding to L...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More