Dynamic target positioning system and method with RFID and laser information integrated
A technology of RFID tags and dynamic targets, which is applied in the field of design of dynamic target positioning systems and methods, can solve the problems of limited positioning accuracy, few researches on dynamic tag positioning and tracking, and it is difficult to apply mobile robot work sites, etc., to achieve positioning Results Precise Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
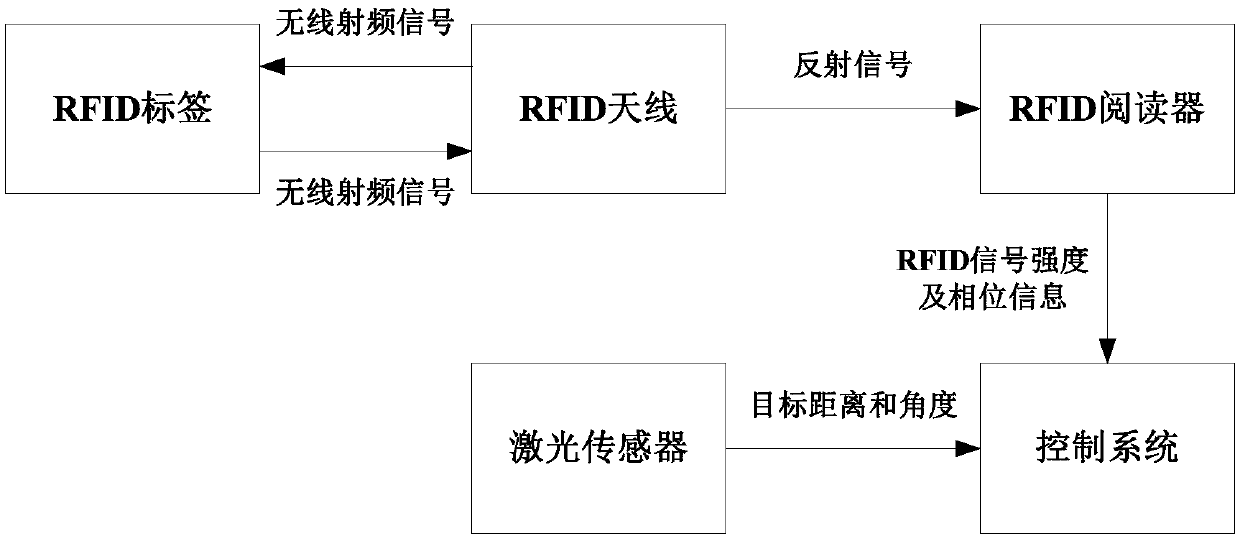
[0031] The embodiment of the present invention provides a dynamic target positioning system that integrates RFID information and laser information, and is used for precise positioning of dynamic targets by robots, such as figure 1 As shown, it includes an RFID tag set on the target, an RFID antenna set on the robot, an RFID reader connected to the RFID antenna, a control system connected to the RFID reader, and a laser sensor connected to the control system.
[0032] Among them, the RFID tag is used to reflect the radio frequency signal sent by the RFID antenna.
[0033] RFID antennas are used to transmit radio frequency signals and receive radio frequency signals reflected by RFID tags.
[0034] The RFID reader is used to obtain the signal strength and phase information of the RFID tag through the RFID antenna.
[0035] The laser sensor is used to measure the distance and angle of the target by laser.
[0036] The control system is used to calculate the moving speed of the ...
Embodiment 2
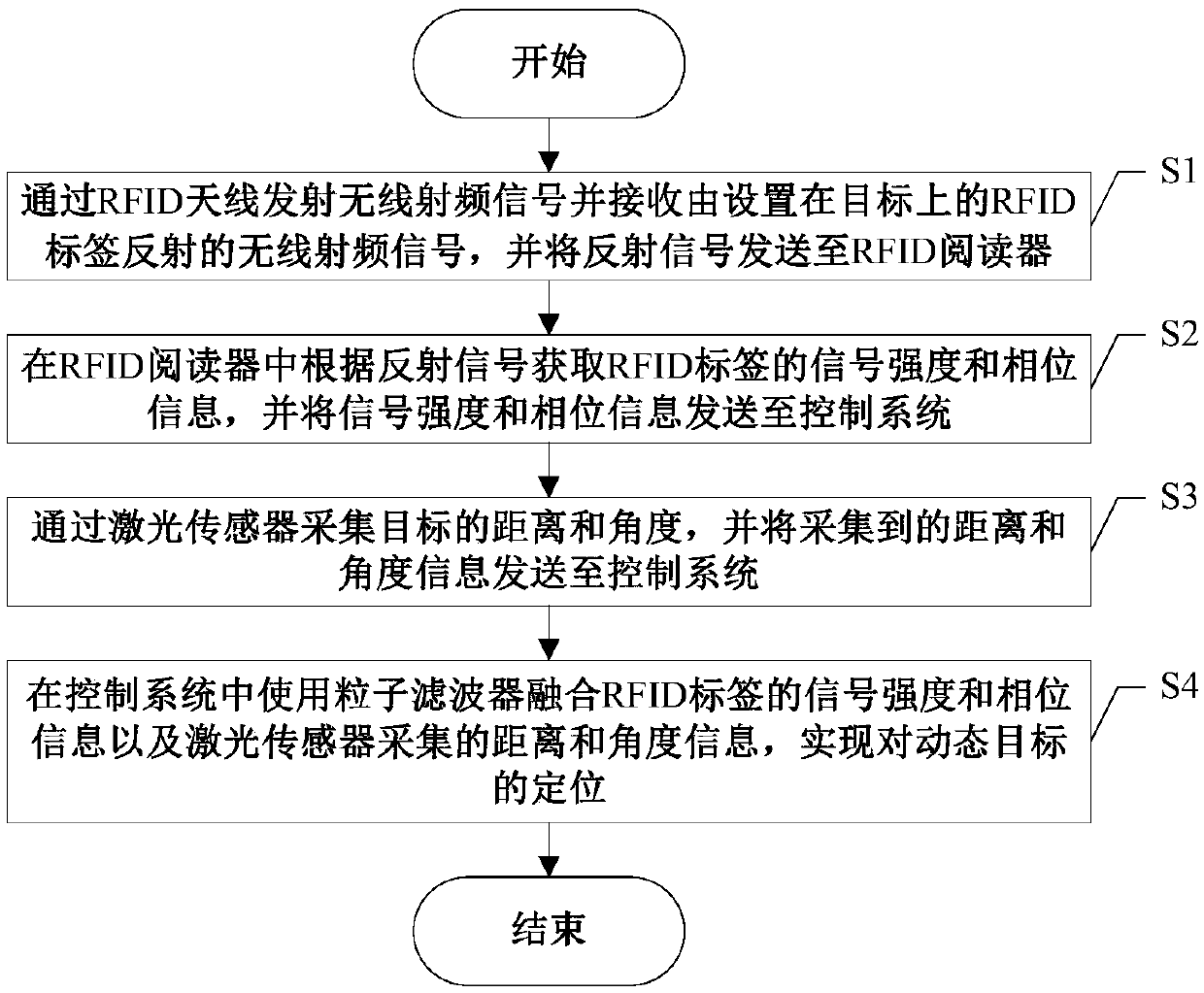
[0038] Embodiments of the present invention provide a dynamic target positioning method that fuses RFID information and laser information, such as figure 2 As shown, including the following steps S1-S4:
[0039] S1. Transmit radio frequency signals through the RFID antenna, receive radio frequency signals reflected by the RFID tags set on the target, and send the reflected signals to the RFID reader.
[0040] S2. Obtain the signal strength and phase information of the RFID tag according to the reflected signal in the RFID reader, and send the signal strength and phase information to the control system.
[0041] S3. Collect the distance and angle of the target through the laser sensor, and send the collected distance and angle information to the control system.
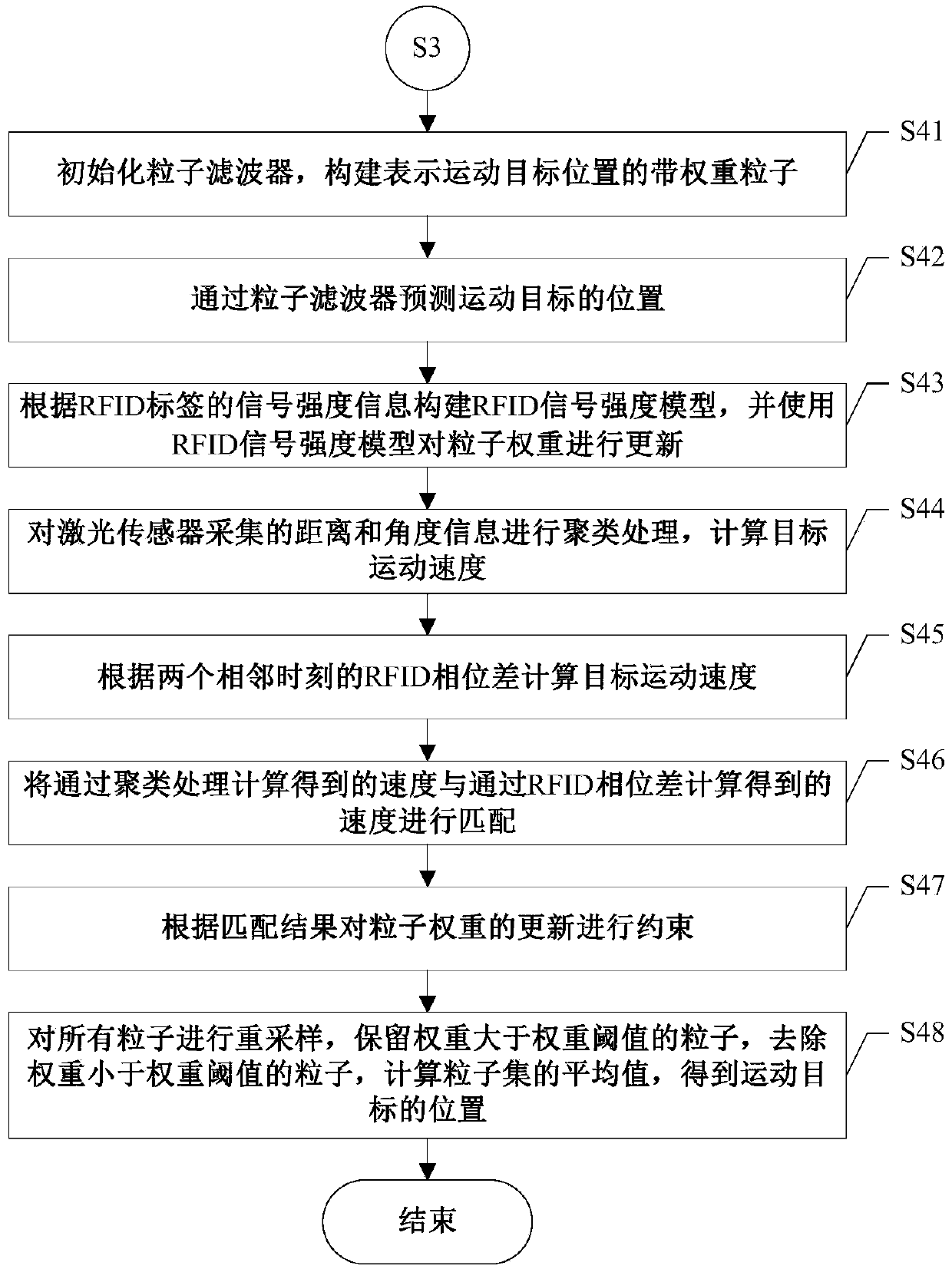
[0042] S4. Use a particle filter in the control system to fuse the signal strength and phase information of the RFID tag and the distance and angle information collected by the laser sensor to realize the positioning...
Embodiment 3
[0087] The following is a further description of a dynamic target positioning system and method for fusing RFID and laser information provided by Embodiment 1 and Embodiment 2 of the present invention with a specific embodiment:
[0088] In the embodiment of the present invention, the SCITOS G5 service robot of German Metralabs company is used, and a model is installed on this robot the laser sensor of SICK S300 (maximum measurement distance is 29 meters, and resolution is 0.5 °, and measurement angle range is 270 °) With an UHF RFID reader model Impinj Speedwayr Revolution R420, this RFID reader provides a maximum identification distance of 7 meters. In addition, two circularly polarized RFID antennas (model Lairs Technologies SS8688P) at an angle of 45° to the forward direction of the robot are installed on the robot body.
[0089] First, carry out RSSI offline modeling. The embodiment of the present invention adopts a semi-autonomous learning method to establish an RFID sig...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com