

Continuous rotation multifunctional three-finger mechanical paw
A mechanical claw and multi-functional technology, applied in the fields of mechanical design, robotics, and mechanism, can solve problems such as screwing hexagon socket screws, and achieve the effects of easy promotion, simple control, and compact overall structure
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0027] The present invention will be described in further detail below in conjunction with the accompanying drawings.
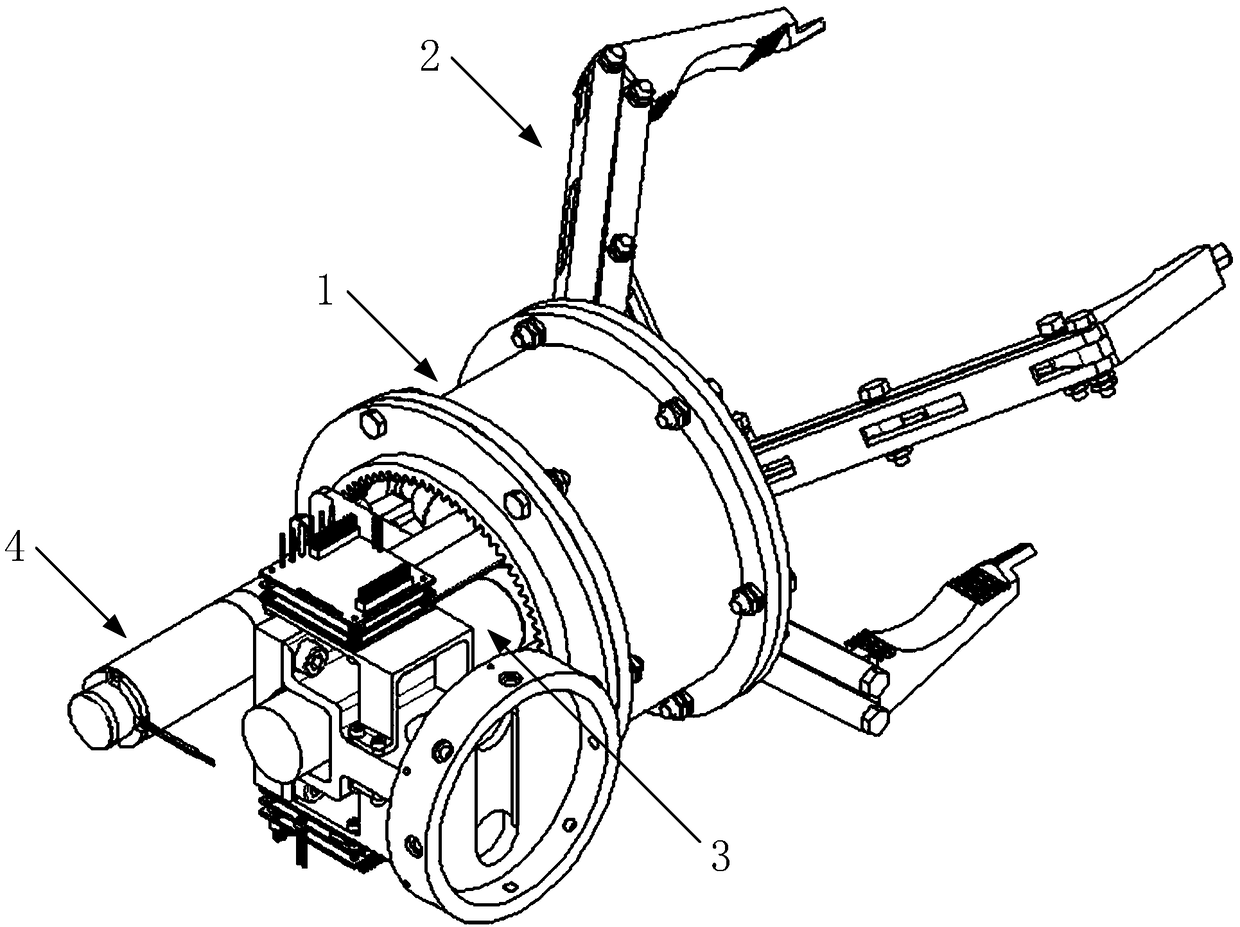
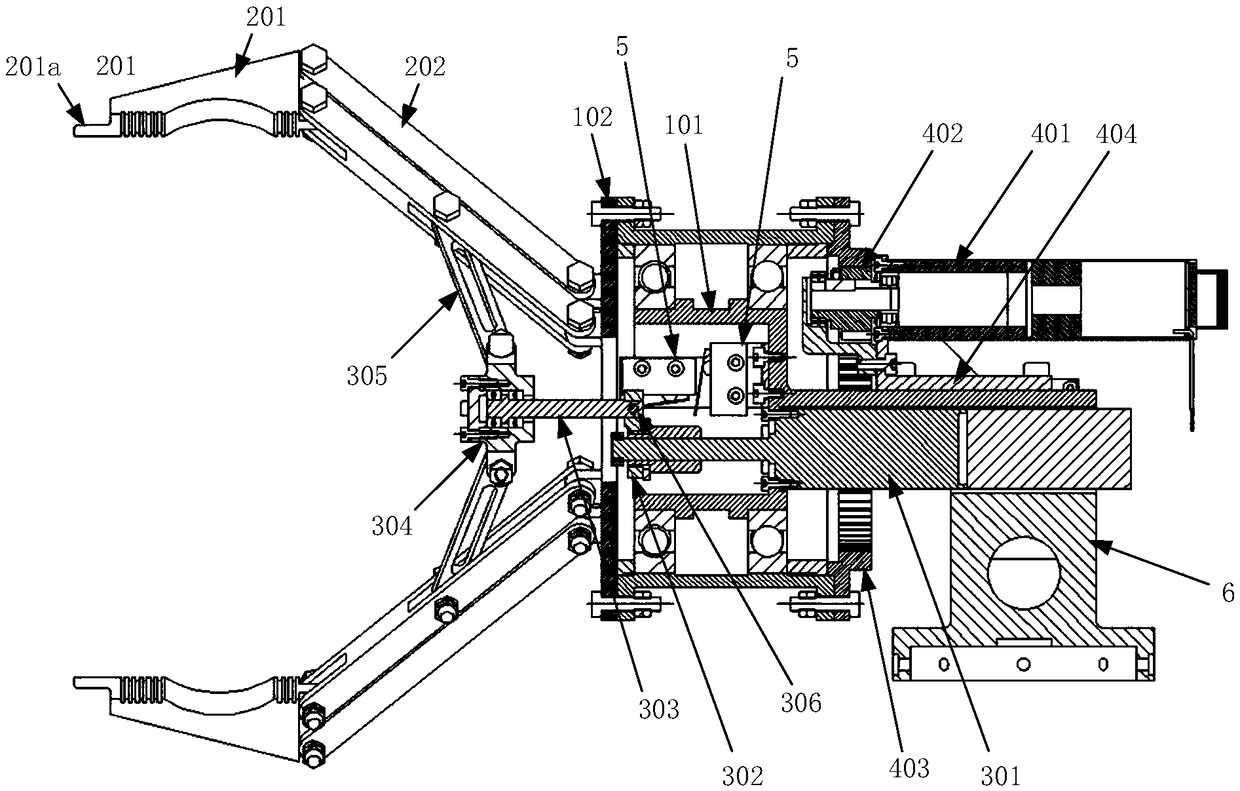
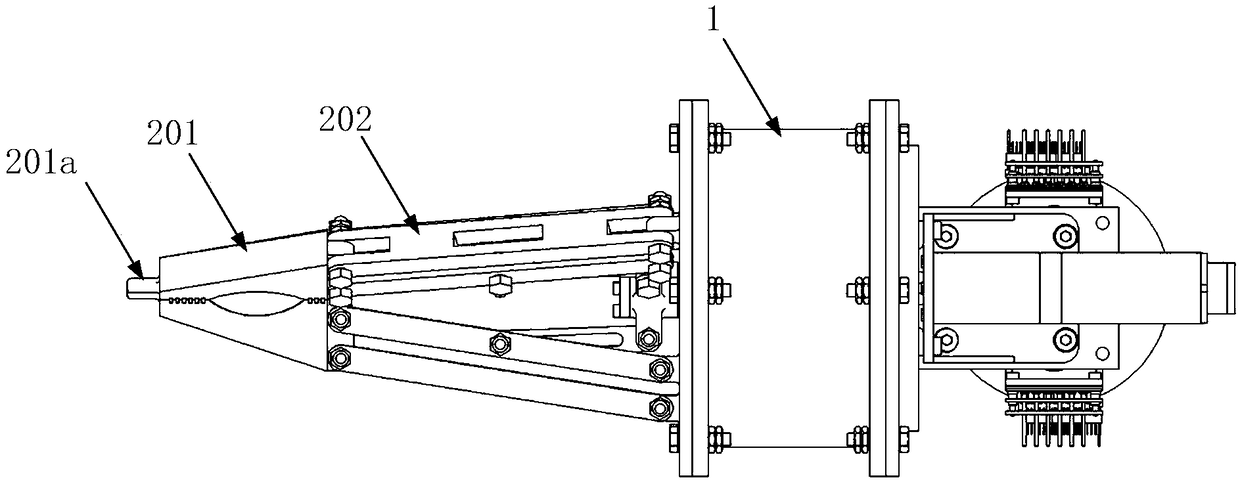
[0028] The present invention continuously rotates the multifunctional three-finger mechanical gripper, such as figure 1 As shown, it includes a three-finger robot gripper wrist 1 , a robot finger 2 , a three-finger opening and closing drive mechanism 3 and a wrist rotation drive mechanism 4 . Wherein, the wrist part 1 of the three-finger manipulator has a cylindrical structure, and a stator shaft 101 is installed inside through a bearing, such as figure 2 As shown; the front end surface of the three-finger manipulator claw wrist 1 is coaxially installed with an annular three-finger end cover 102 for installing the mechanical finger 2 . There are three mechanical fingers 2, all adopting the existing four-link structure mechanical fingers, with finger ends 201 and knuckles 202, which are arranged symmetrically in a triangle at the front end of the three-finge...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More