

Arrival time-based cooperative localization method applied to wireless sensor network
A wireless sensor network and collaborative positioning technology, applied in positioning, network topology, wireless communication, etc., can solve problems such as increased convex optimization and difficulties
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0019] The present invention will be described in further detail below in conjunction with the embodiments of the drawings.
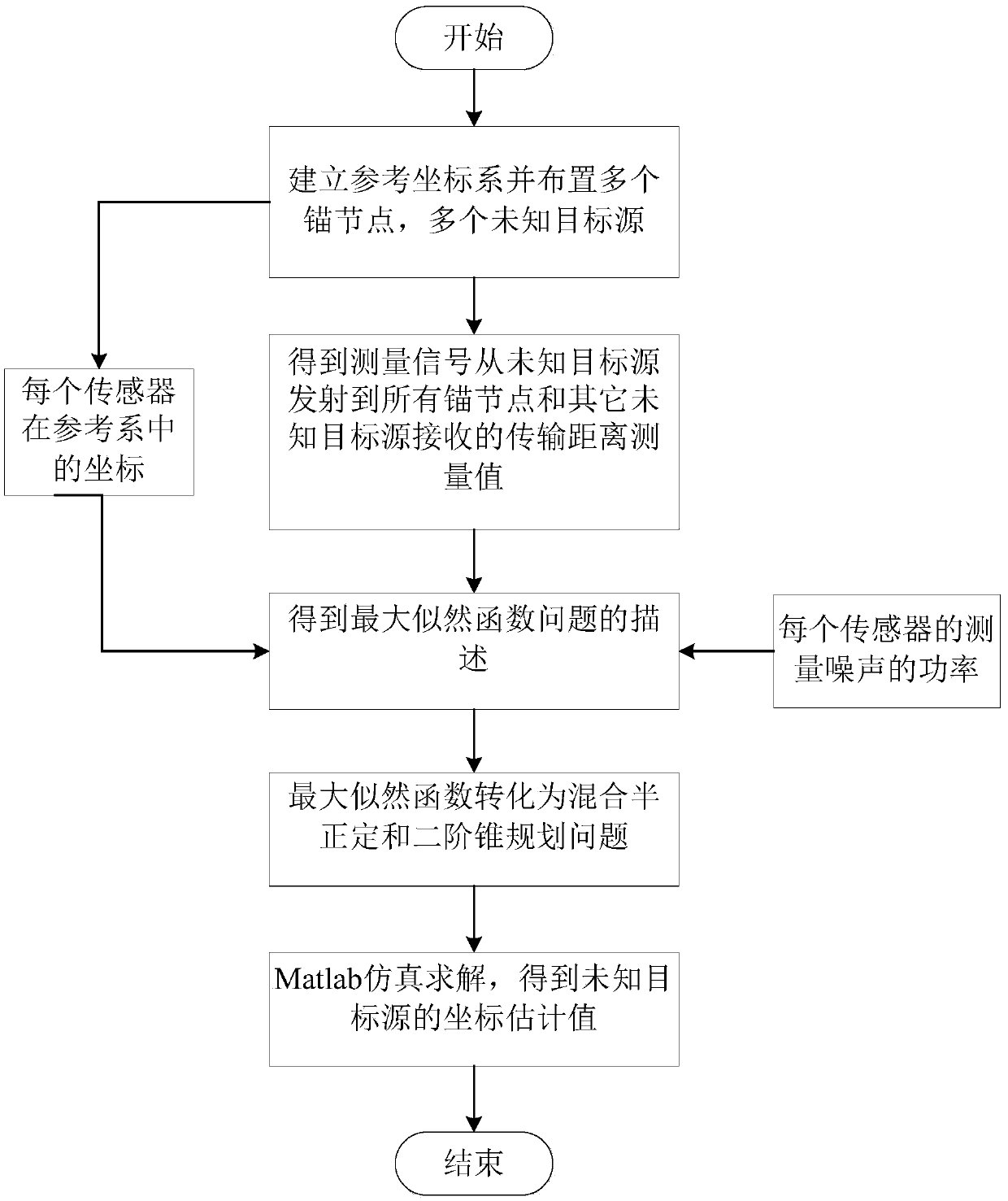
[0020] The present invention proposes a coordinated positioning method based on time of arrival applied to wireless sensor networks, and its overall implementation block diagram is as follows figure 1 As shown, it includes the following steps:
[0021] Step 1: In the wireless sensor network environment, establish a plane rectangular coordinate system or a spatial coordinate system as the reference coordinate system, and set the existence of M anchor nodes and N unknown target sources; then set the M anchor nodes in the reference coordinates Correspondence of coordinates in the system is denoted as s 1 ,s 2 ,...,S M , And mark the coordinates of N unknown target sources in the reference coordinate system as x 1 ,x 2 ,...,X N ; Among them, M≥2, in this embodiment M=4, N≥2, in this embodiment N=5, s 1 Is the coordinate of the first anchor node in the reference ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More