

Force/position coordinated multi-arm robot compliance control method
A compliant control and robot technology, applied in the direction of program control of manipulators, manipulators, manufacturing tools, etc., can solve problems such as the influence of manipulator pose tracking, short closed-loop period of manipulators, slow physical response and closed-loop period, etc., to shorten the response period , Improve the accuracy and ensure the effect of accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0048] In order to make the purpose, technical solutions and advantages of the present invention clearer, the technical solutions of the present invention will be further described in detail below in conjunction with the accompanying drawings and specific embodiments:
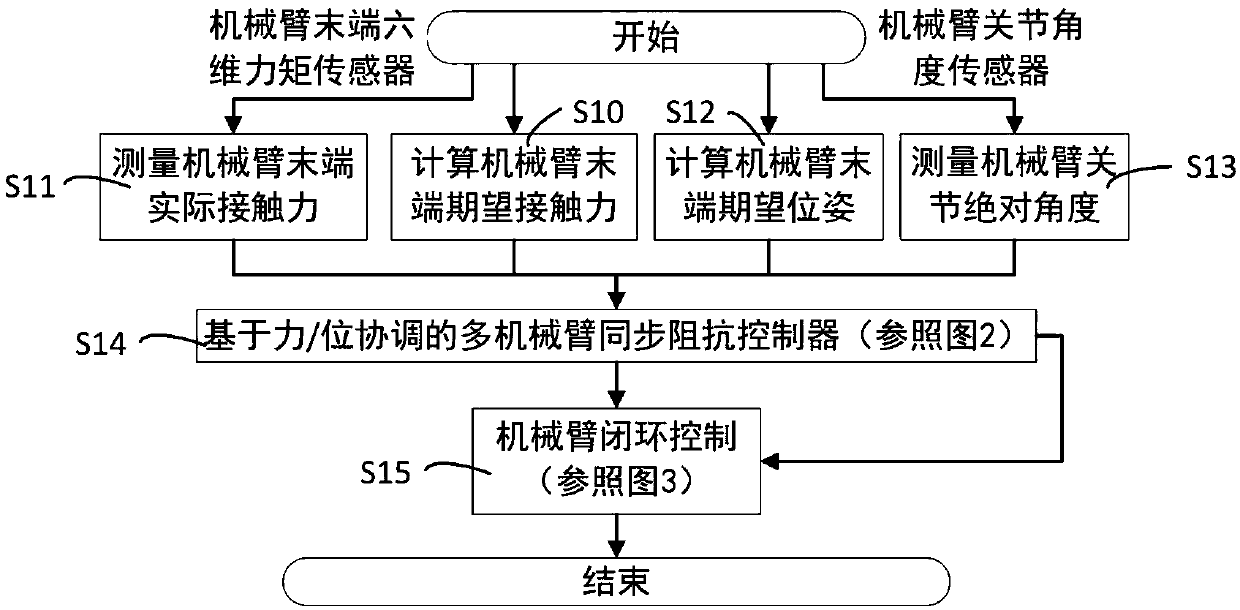
[0049] Such as figure 1 As shown, a force / position coordinated multi-arm robot compliant control method, the robot has N mechanical arms T ={ t 1 , t 2 ,..., t i ,..., t N}, 1i represents the i-th robotic arm, and the control method specifically includes the following steps:
[0050] Step S10, calculating the expected contact force at the end of the manipulator from the operation task of the manipulator;
[0051] Step S11, measuring the actual contact force at the end of the manipulator through the installed six-dimensional torque sensor at the end of the manipulator;
[0052] Step S12, calculating the expected pose of the end of the manipulator from the operation task of the manipulator;
[0053] Ste...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More