

Multi-sensor fusion based SLAM and obstacle avoidance mobile chassis
A multi-sensor fusion, mobile chassis technology, applied in the field of robotics, can solve problems such as failure of navigation and obstacle avoidance, poor accuracy of large-scale mapping, and increased sensor burden, so as to achieve positioning and obstacle avoidance, enhance perception capabilities, and improve construction. The effect of graph accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0035] The following will clearly and completely describe the technical solutions in the embodiments of the present invention with reference to the accompanying drawings in the embodiments of the present invention. Obviously, the described embodiments are only some, not all, embodiments of the present invention. Based on the embodiments of the present invention, all other embodiments obtained by persons of ordinary skill in the art without creative efforts fall within the protection scope of the present invention.
[0036] It should be noted that, in the case of no conflict, the embodiments of the present invention and the features in the embodiments can be combined with each other.
[0037] The present invention will be further described below in conjunction with the accompanying drawings and specific embodiments, but not as a limitation of the present invention.
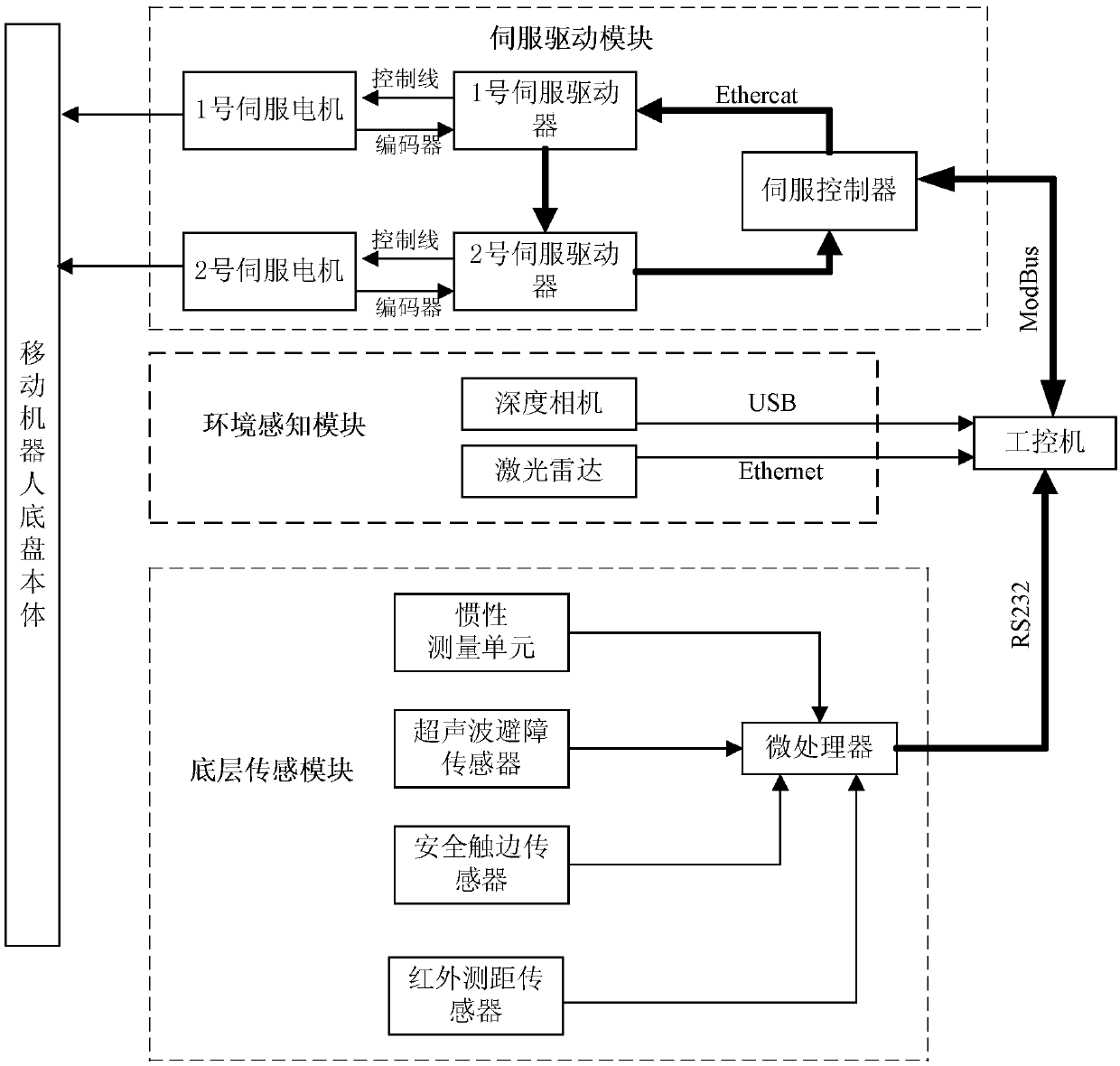
[0038] A mobile chassis based on multi-sensor fusion SLAM and obstacle avoidance of the present invention, such ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More