

Manufacturing manipulator with automatic clamping and placing functions
A manipulator and functional technology, applied in the field of manipulators, can solve the problems of inability to realize remote control of operators, inconvenient operation of manipulators, poor clamping and fixing effects, etc., and achieve the effect of improving practicability, increasing friction, and simple operation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0019] The following will clearly and completely describe the technical solutions in the embodiments of the present invention with reference to the accompanying drawings in the embodiments of the present invention. Obviously, the described embodiments are only some, not all, embodiments of the present invention. Based on the embodiments of the present invention, all other embodiments obtained by persons of ordinary skill in the art without making creative efforts belong to the protection scope of the present invention.
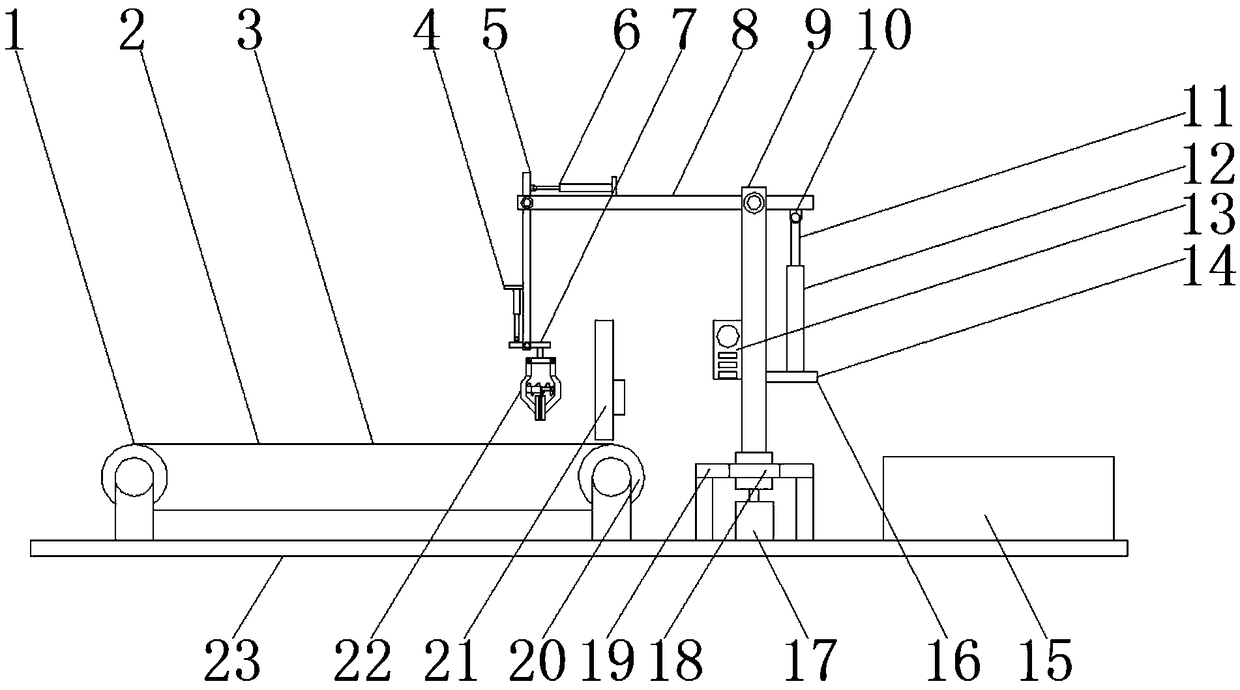
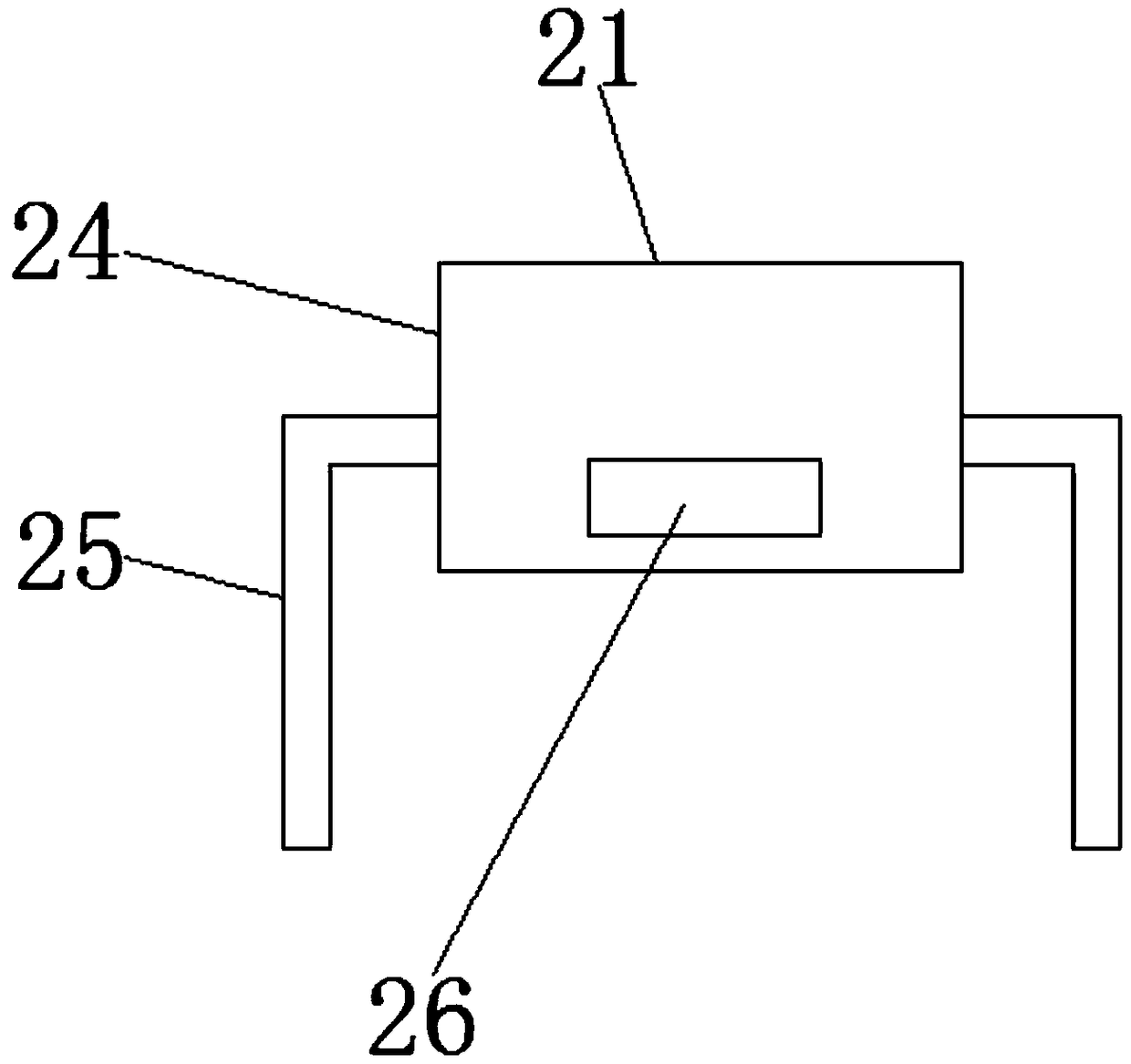
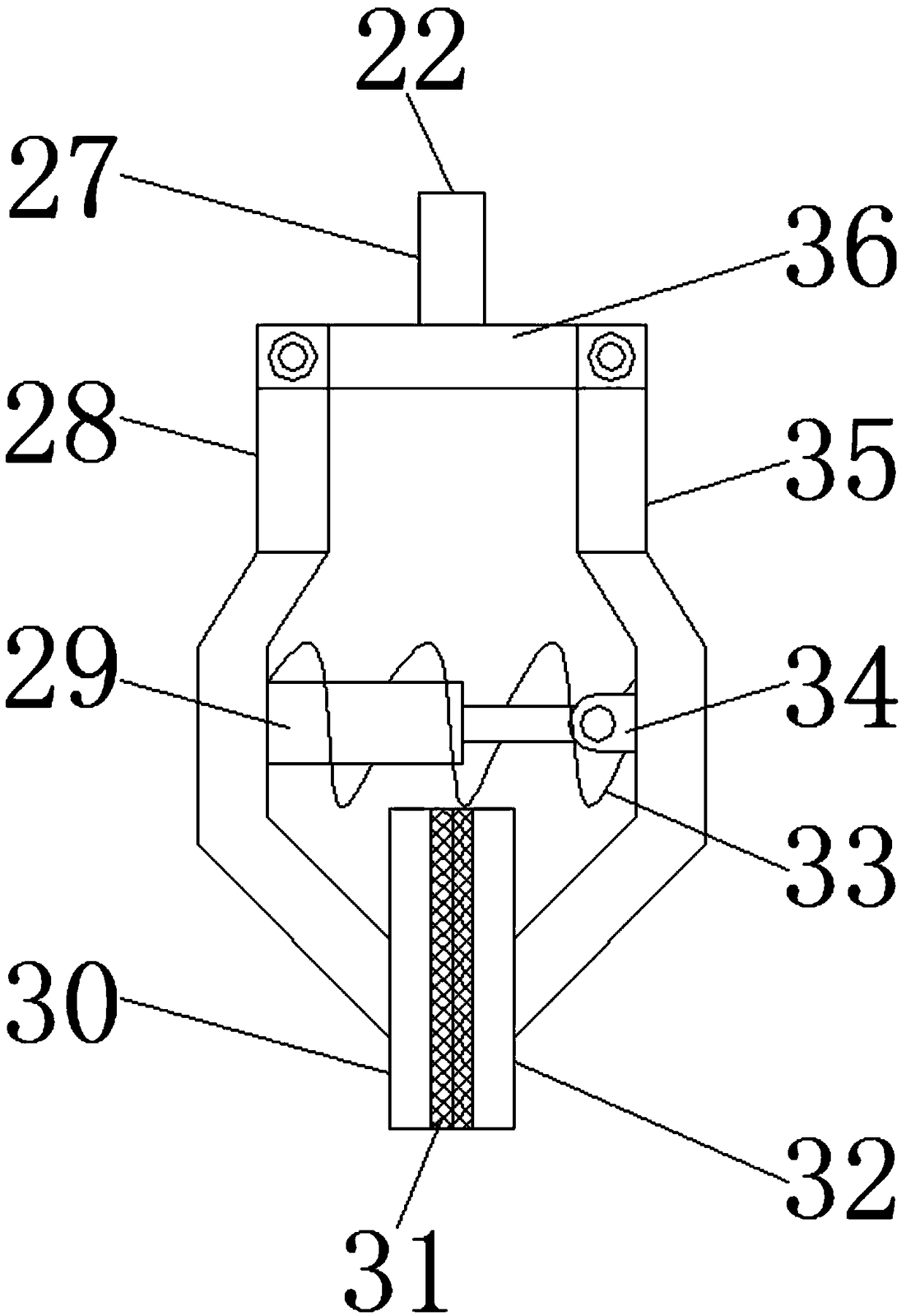
[0020] see Figure 1~4 , in an embodiment of the present invention, a manufacturing manipulator with automatic gripping and placing functions includes a conveying device 2, a first driving device 4, a first connecting rod 5, a second driving device 6, a second connecting rod 7, The third connecting rod 8, the vertical rod 9, the controller 13, the collection tank 15, the third driving device 16, the motor 17, the rotating table 18, the horizontal plate 19, the...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More