

Ostrich-simulated robot control system with human-computer-environment co-fusion characteristics
A control system and robot technology, applied in the field of robotics and engineering bionics, can solve the problems of lack of human-computer interaction interface, single operation mode, etc., and achieve the effect of improving human-computer interaction ability, improving environmental adaptability, and increasing traction
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
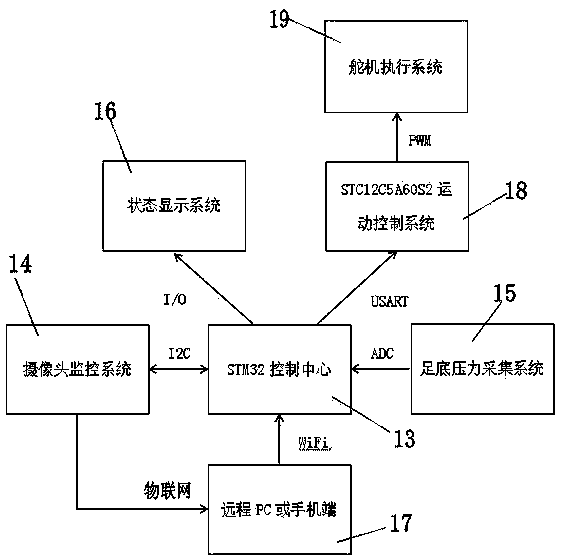
[0022] Such as figure 1 As shown, the present invention includes STM32 control center 13, camera monitoring system 14, plantar pressure acquisition system 15, status display system 16, remote PC or mobile phone 17, STC12C5A60S2 motion control system 18 and steering gear execution system 19, remote PC Or the mobile phone 17 is connected to the STM32 control center 13 through WiFi signals, the camera monitoring system 14 is bidirectionally connected to the STM32 control center 13 through the I2C bus, the plantar pressure acquisition system 15 is connected to the STM32 control center 13 through the ADC interface, and the STM32 control center 13 passes through The I / O port is connected to the status display system 16, the STM32 control center 13 is connected to the STC12C5A60S2 motion control system 18 through the USART serial port, the STC12C5A60S2 motion control system 18 is connected to the steering gear execution system 19 through the PWM signal, and the camera monitoring system ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More