

Six-freedom-degree humanoid chewing mechanism
A technology of a degree of freedom and a rotating drive mechanism, applied in the field of bionic mechanisms, can solve problems such as difficult control, complex structure, and large space occupation, and achieve the effects of convenient control, precise movement, and simple structure
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
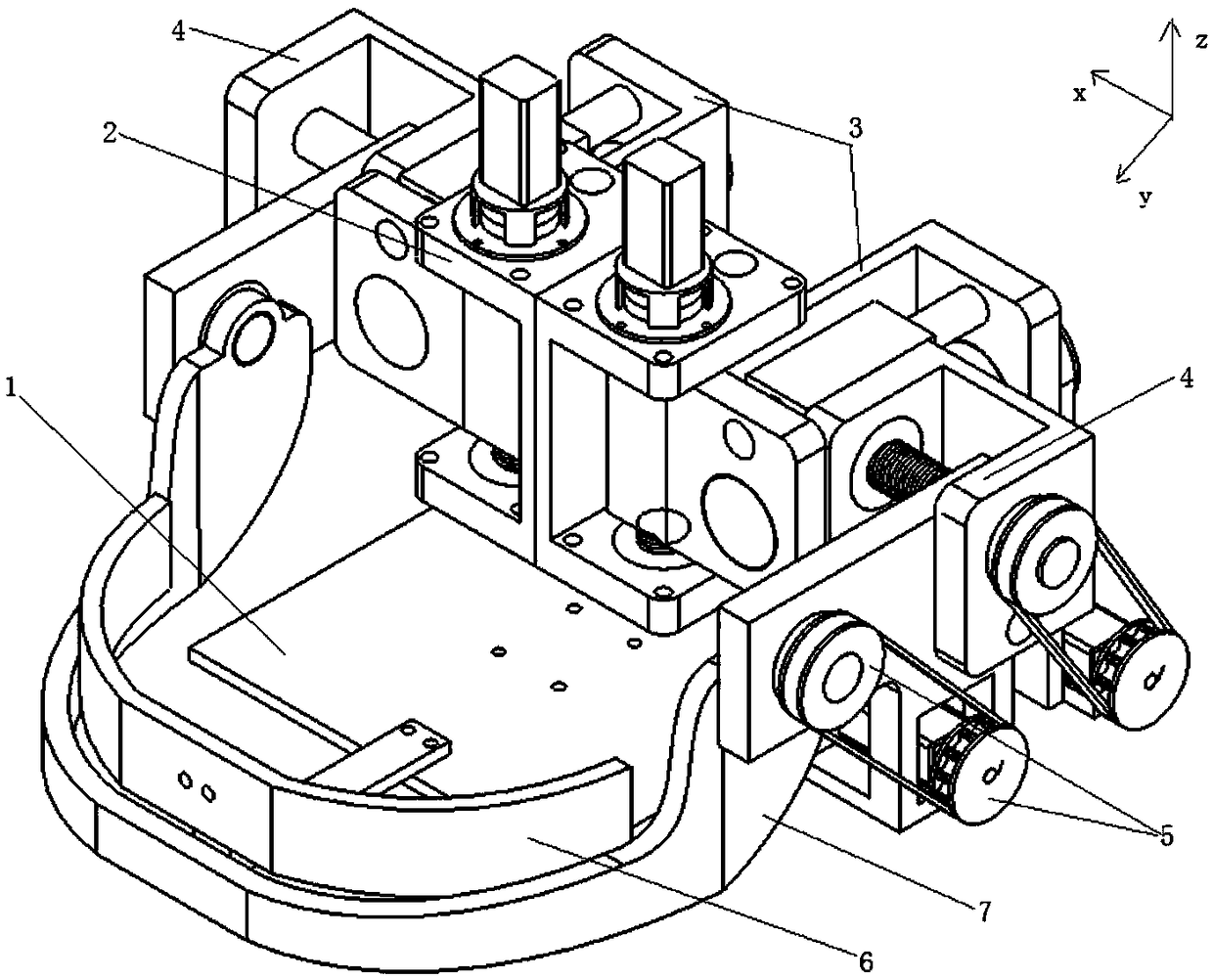
[0031] The object of the present invention is to address the deficiencies of the prior art and provide a humanoid chewing mechanism with 6 degrees of freedom, which has a simple and compact structure, low noise, low cost, improved power density ratio, and can realize highly simulated chewing movements.
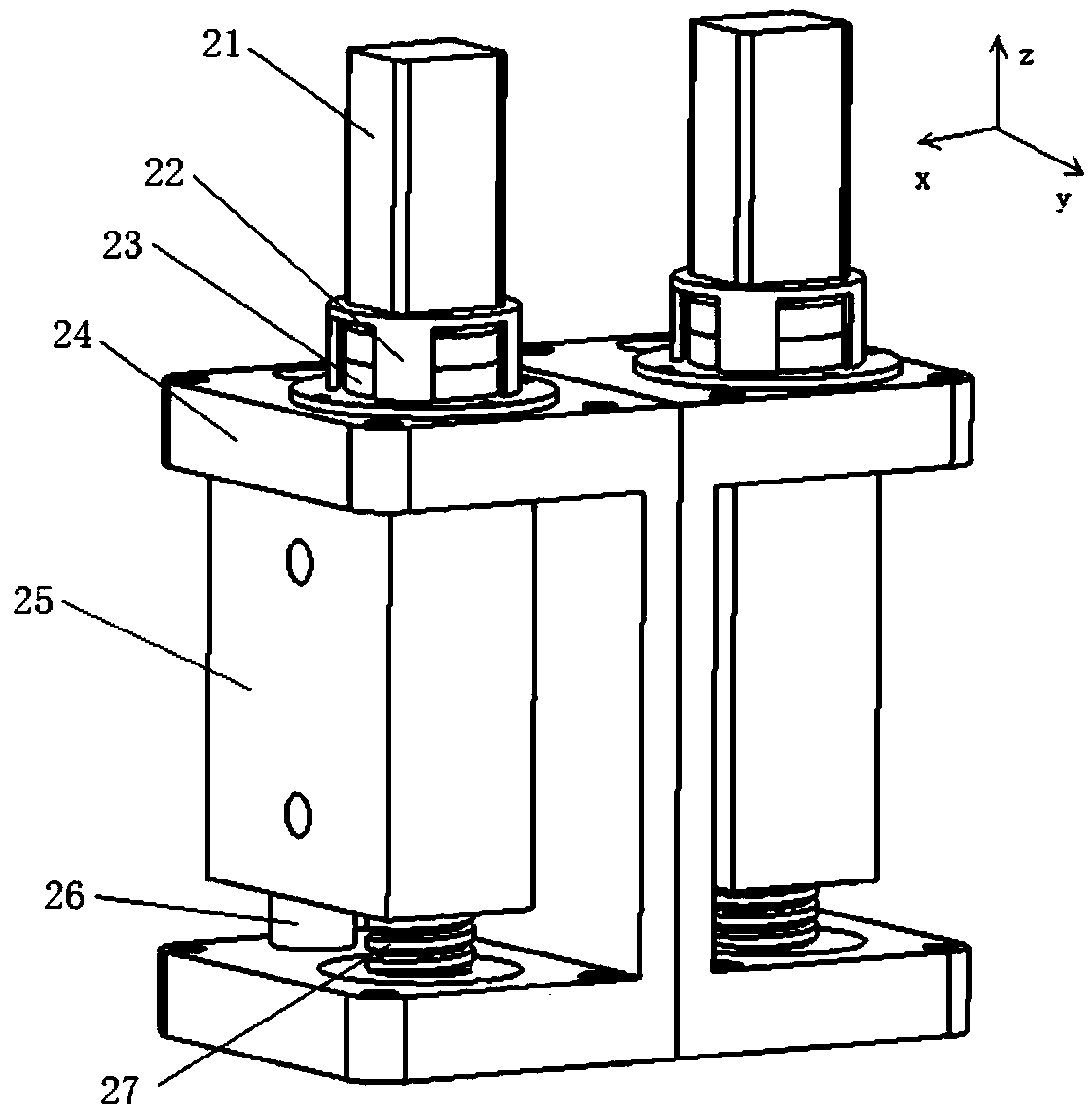
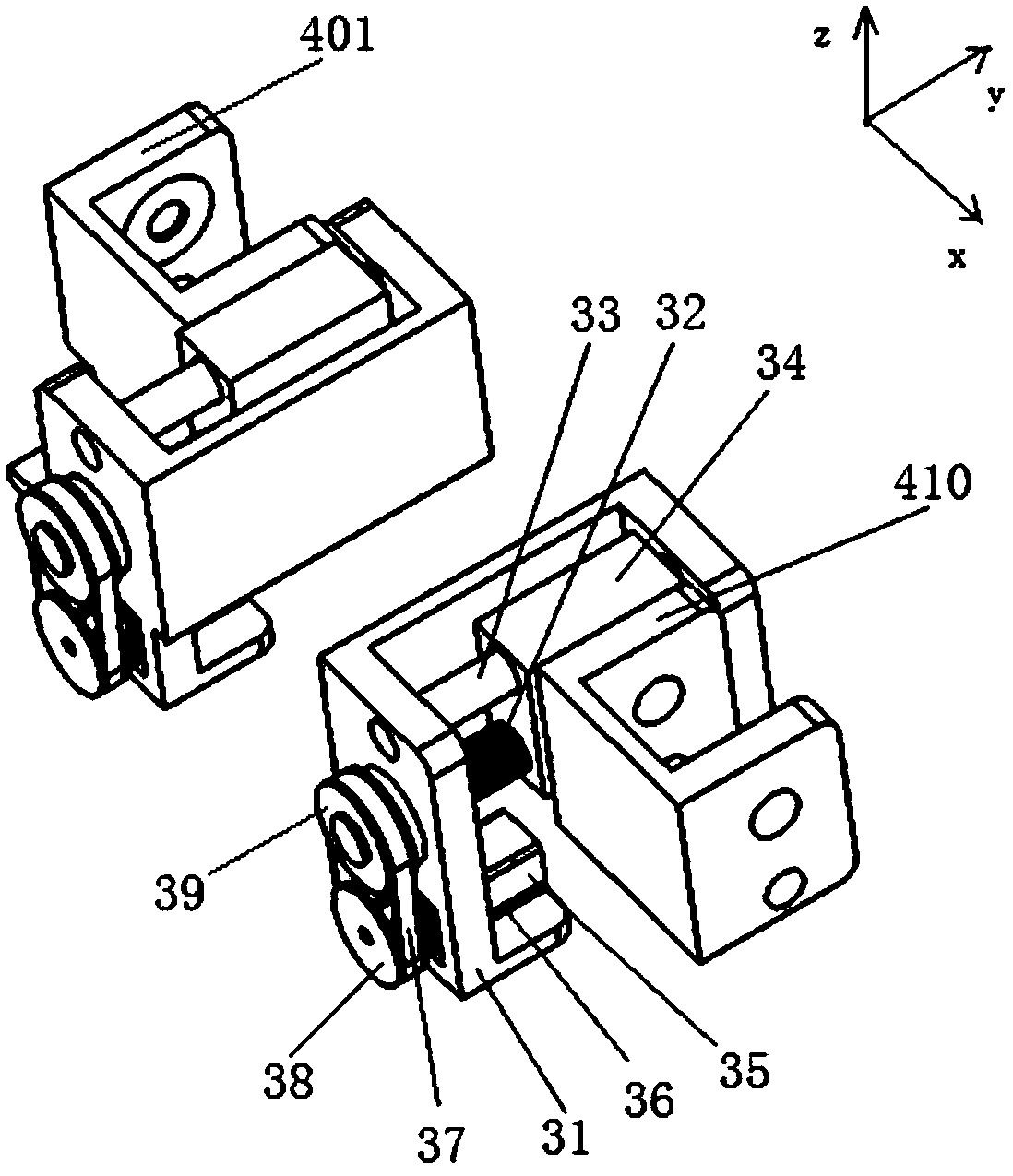
[0032] In order to achieve the above-mentioned purpose, the idea of the present invention is to use a DC motor to drive, and in the up and down moving platform and forward and backward moving platform, the movement along the z-axis and the rotation around the z-axis can be realized through the movement of the DC motor at the same speed or at a different speed , move along the y-axis, and rotate around the y-axis; in the left and right moving platforms, use two DC motors to control the movement along the x-axis and the rotation around the x-axis, thereby completing the six degrees of freedom of the humanoid mandible and realizing a highly anthropomorphic chewing exercise.
[...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More