

Remote navigation path planning method based on energy consumption optimization and considering ocean circulation influence for UUV
A technology of energy consumption and path planning, applied in navigation, measuring device, mapping and navigation, etc., can solve the problems of lack of effectiveness, monotonous X-axis direction, weakening the diversity of output results, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0056] The present invention is described in more detail below in conjunction with accompanying drawing example:
[0057] combine figure 1 -8. The path planning method of the present invention can use various optimization algorithms to realize the optimization process of planning by establishing a UUV-based energy consumption model, such as an evolutionary algorithm. Taking the QPSO algorithm as an example, it can be implemented according to the following steps:
[0058] Step 1: Determine the actual speed V of the UUV over the ground g And real-time updated ocean current information V c . Among them, the specific method of determining the speed and the establishment of the coordinate system are as follows:
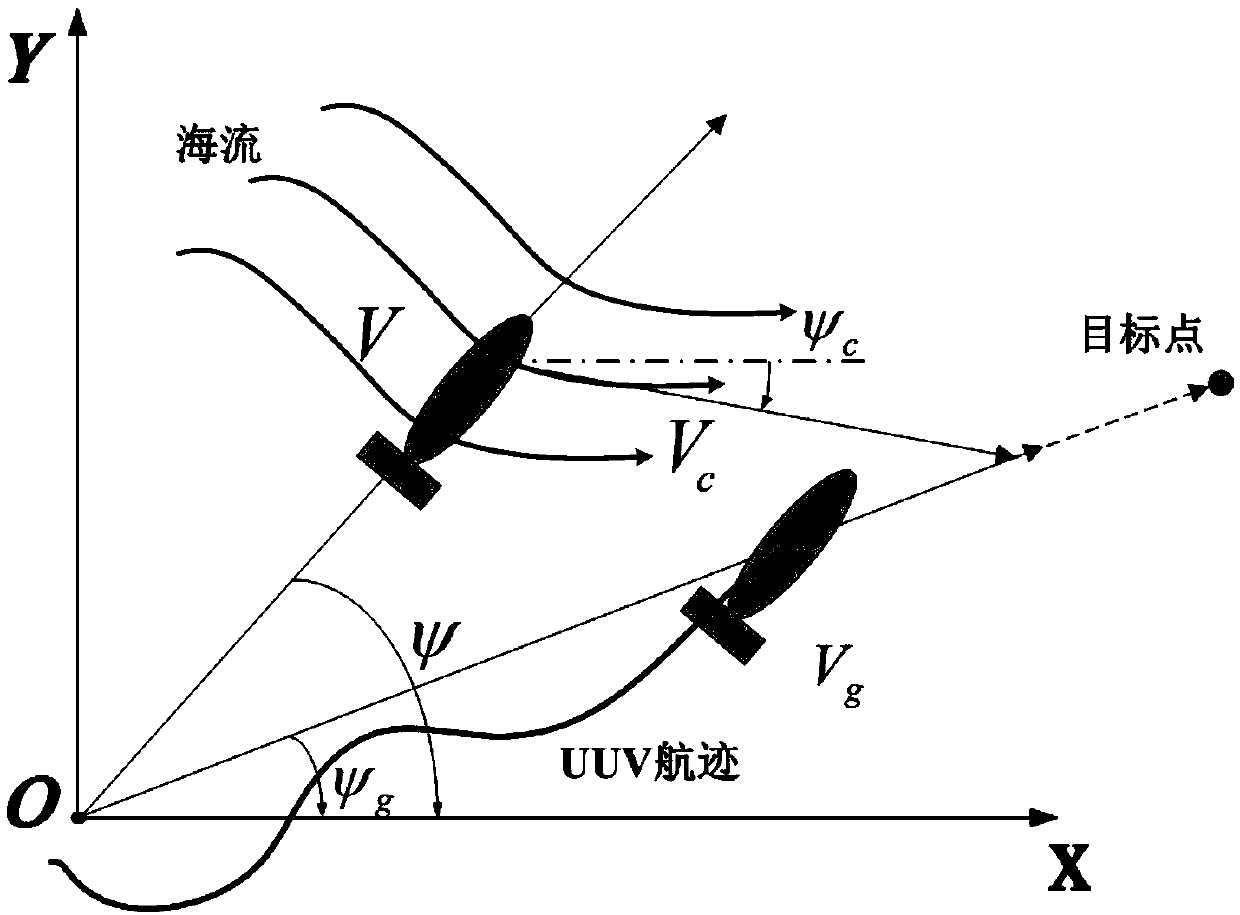
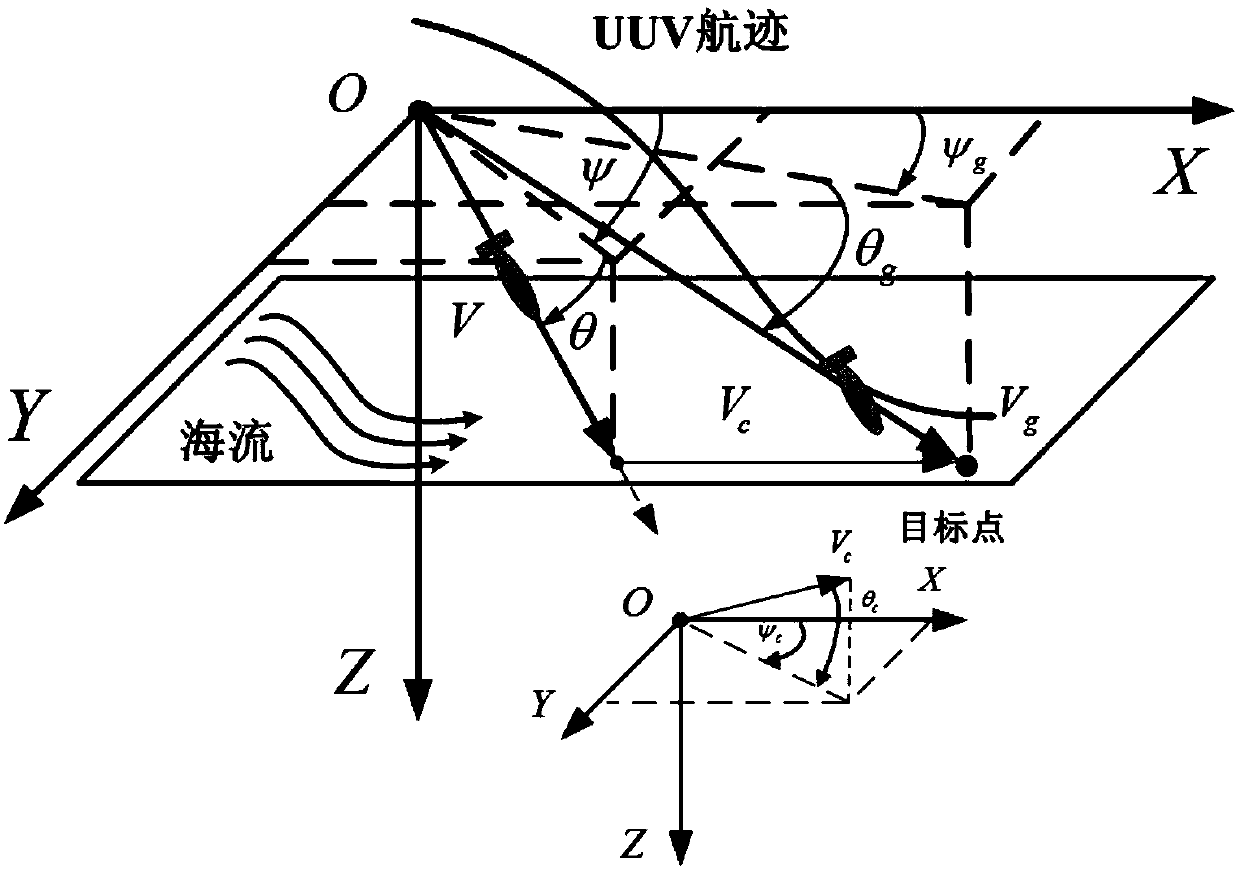
[0059] like figure 1 As shown, a fixed coordinate system for UUV navigation in a two-dimensional ocean environment is established, where the X-axis faces the true north of the geographic location, and the Y-axis faces the true east of the geographic location. Among t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More