

Adaptive tracking method for sea-surface target scale of unmanned ship in high sea state based coherent filtering
An adaptive tracking and correlation filtering technology, applied in ICT adaptation, image analysis, climate sustainability, etc., can solve the problem that unmanned boats cannot track targets, and achieve the effect of improving accuracy and robustness
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0027] In order to make the object, technical solution and advantages of the present invention clearer, the preferred embodiments of the present invention will be further described in detail below in conjunction with the accompanying drawings.
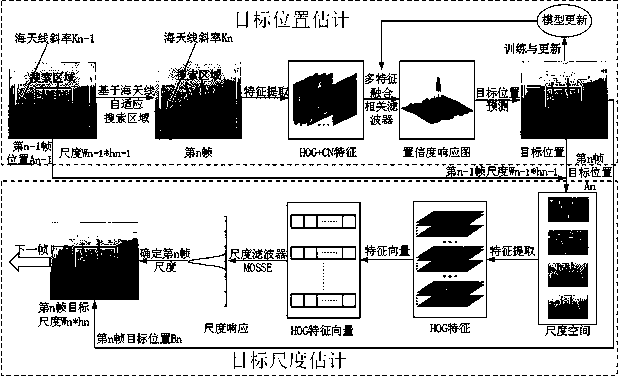
[0028] Such as figure 1 As shown in Fig. 1, an adaptive tracking method for sea surface target scale of unmanned vehicle under high sea conditions based on correlation filtering, including the following steps:
[0029] S01, target preprocessing:
[0030] This embodiment adopts a double-threshold preprocessing strategy. If the target resolution of the first frame is greater than the threshold MAX, the area of the search area is reduced according to a certain proportional coefficient; if the target resolution of the first frame is smaller than the threshold MIN, the area of the search area is reduced to Amplify according to a certain scale factor. The scaling factor SF (scale factor) is:
[0031]
[0032] Among them, S' represe...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More