Rotary table and robot camera calibration system
A rotary table and camera technology, applied in the field of robot vision, can solve the problems of errors and complicated operations, and achieve the effect of avoiding human errors and improving the calibration accuracy.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
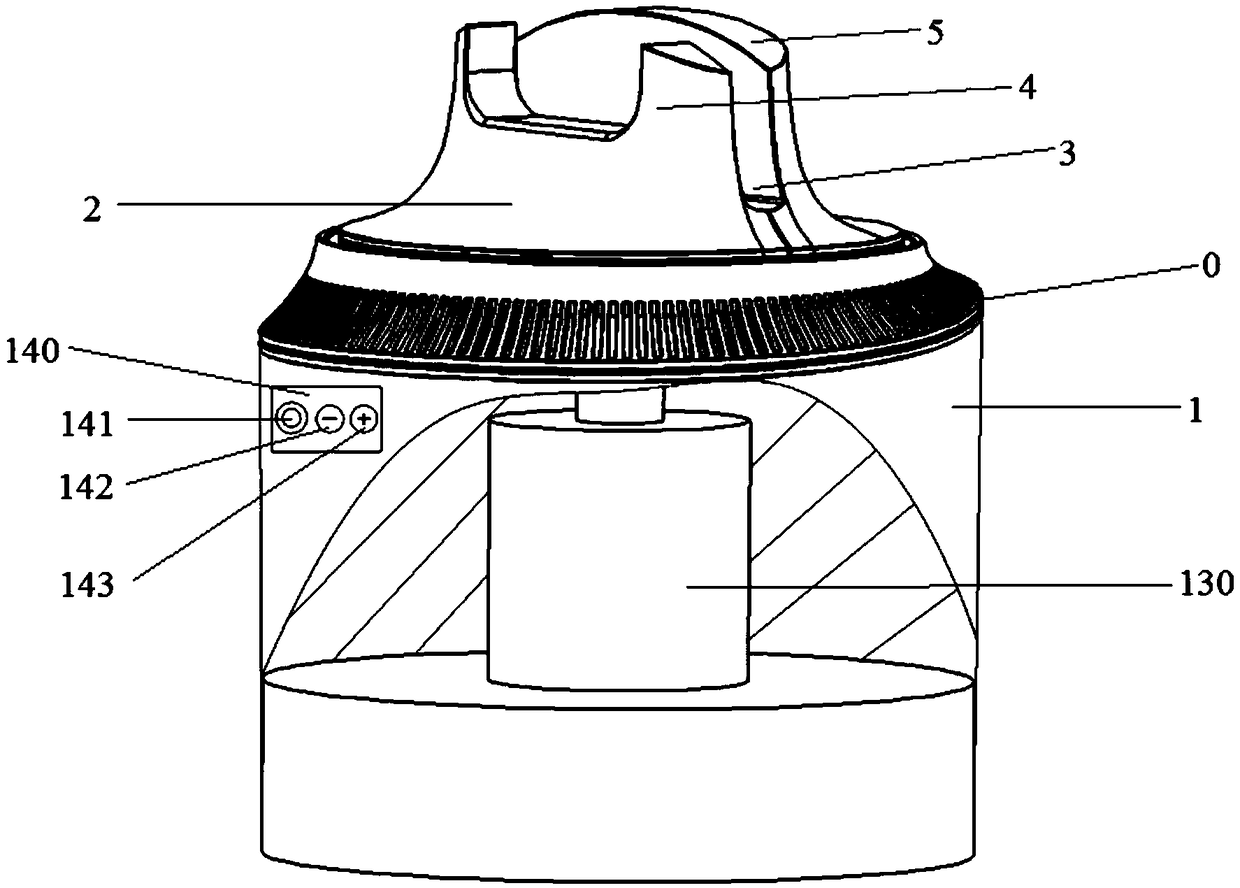
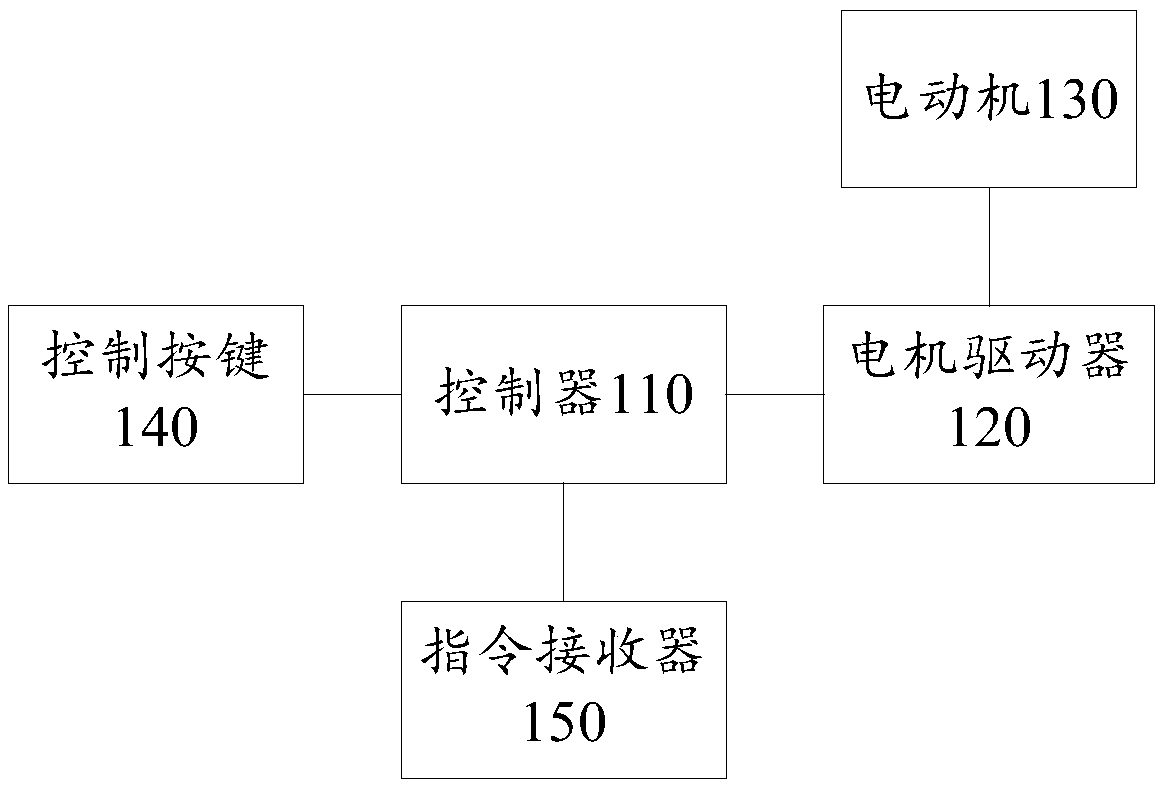
[0039] An embodiment of the present invention provides a rotary table, such as figure 1 and figure 2 shown. rotating table (i.e. image 3 The rotating table 6) in is used to drive the flat mirror 7 to rotate to a preset angle, so that the camera (ie image 3 The camera in 9) captures the marker (i.e. image 3 The calibration image formed by the marker 8 in the plane mirror 7 is used to calibrate the extrinsic parameters of the camera. Rotary table 6 comprises housing 1, rotating bracket 2 and motor 130, and rotating bracket 2 is driven by motor 130 and rotates relative to housing 1, and rotating bracket 2 is provided with draw-in groove 3; image 3 The plane mirror in 7).
[0040] Optionally, the shell 1 can be a cylinder, and a cavity can be formed inside the shell 1, and a rotating shaft is arranged at the bottom of the cavity, and the rotating shaft is connected with the rotating bracket 2, so as to make the rotating bracket 2 complete the rotation action.
[0041] O...
Embodiment 2
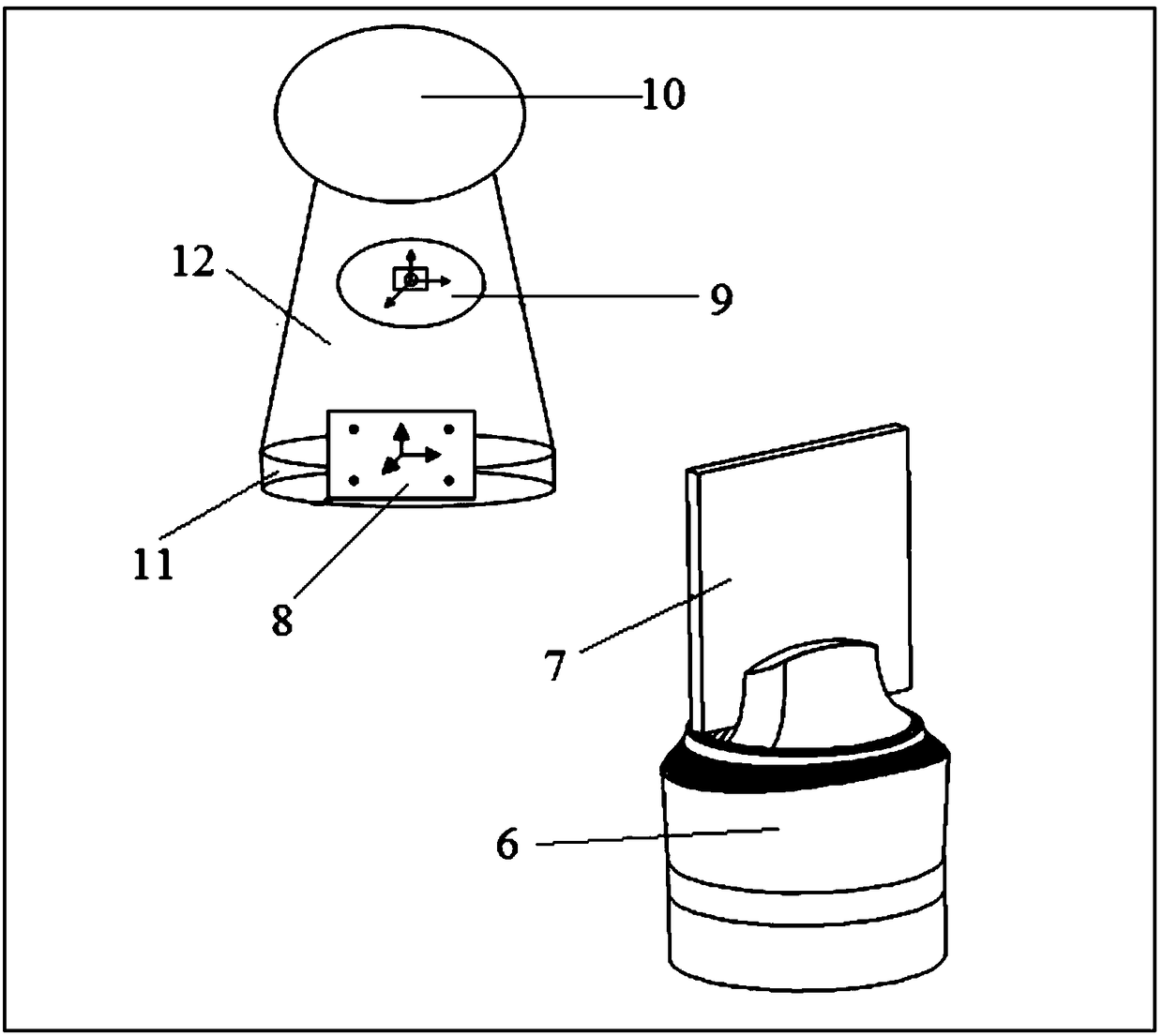
[0062] An embodiment of the present invention provides a robot camera calibration system, such as figure 2 shown. The system includes a flat mirror 7 , a robot 10 , a marker 8 , a camera 9 and a rotary table 6 . The marker 8 and the camera 9 are installed on the robot 10, and the plane mirror 7 is installed on the turntable 6, and the turntable 6 is used to drive the plane mirror 7 to rotate to a preset angle, so that the camera 9 can photograph the position of the marker 8 in the plane mirror 7. The resulting calibration image is used to calibrate the extrinsic parameters of the camera.
[0063] The robot 10 includes a base 11 and a body 12 connected to each other.
[0064] The camera 9 is a 2D camera, fixedly installed in the middle of the outer wall of the fuselage 12, and used to shoot the calibration image formed by the marker 8 in the plane mirror 7; the marker 8 is fixedly installed on the base 11.
[0065] Optionally, the camera 9 and the marker 8 can be fixedly in...
PUM
 Login to view more
Login to view more Abstract
Description
Claims
Application Information
 Login to view more
Login to view more - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap