

An alignment robot gripper for shearing plates
A robot hand, Chinese-style technology, applied in the direction of the manipulator, the attachment of the shearing machine, the shearing device, etc., can solve the problems of easy clamping of thin plates, strong clamping pressure, affecting the clamping force of sheet metal parts, etc. The effect of flat structure, reduced assembly workload, and stable strength
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0026] The present invention will be described in detail below with reference to the drawings and specific embodiments. This embodiment is implemented on the premise of the technical solution of the present invention, and a detailed implementation mode and specific operation process are given, but the protection scope of the present invention is not limited to the following embodiments.
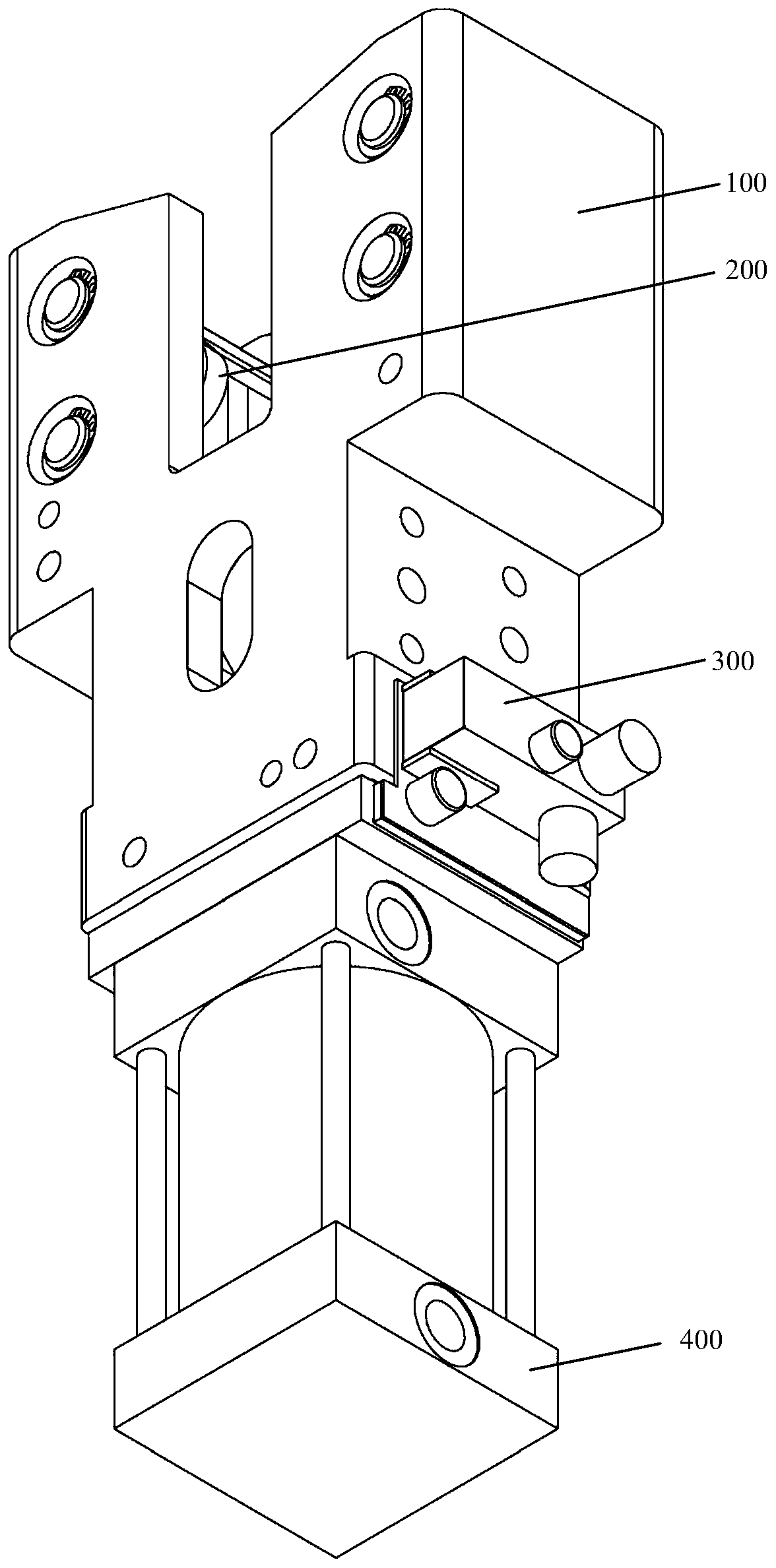
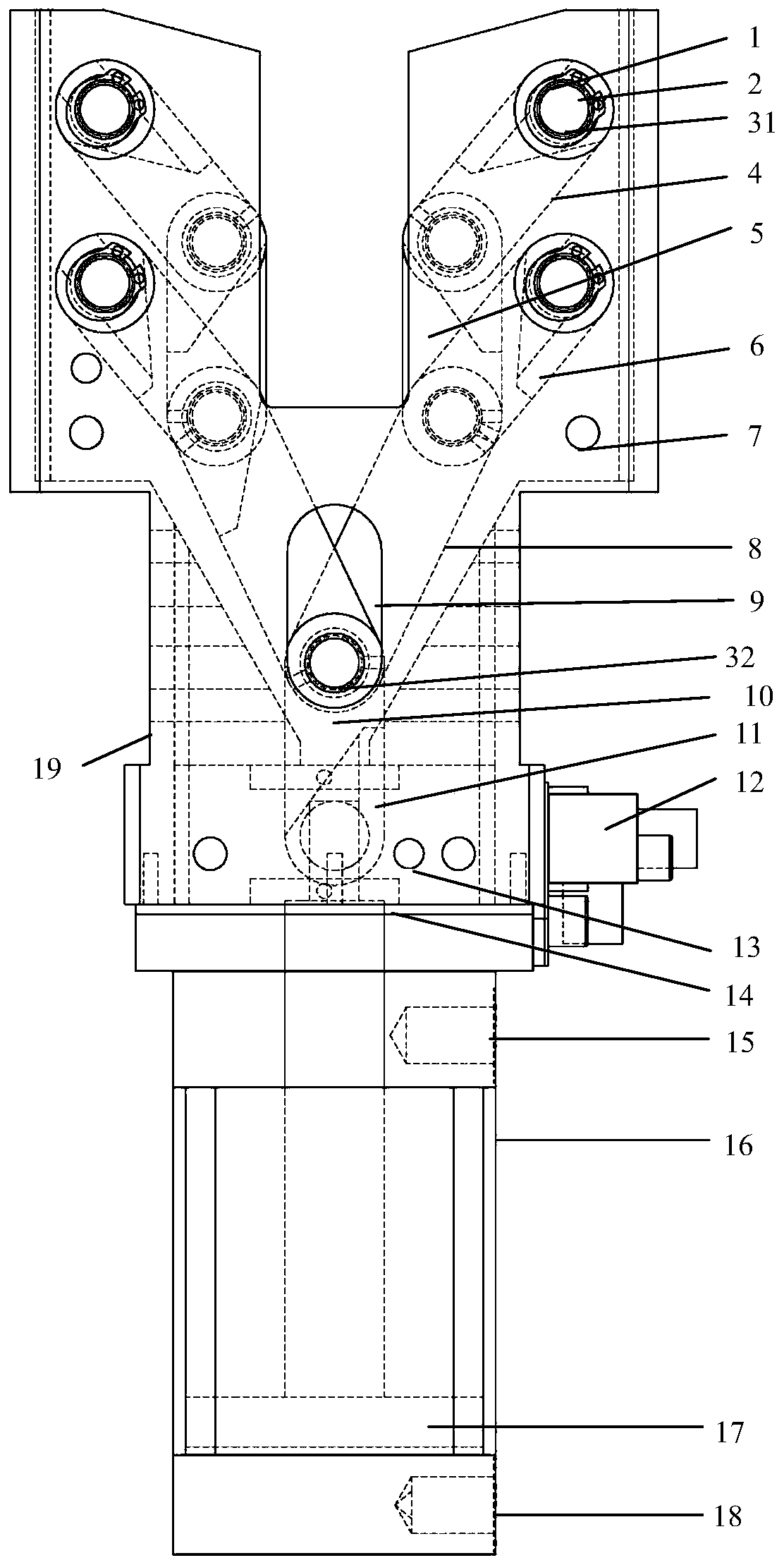
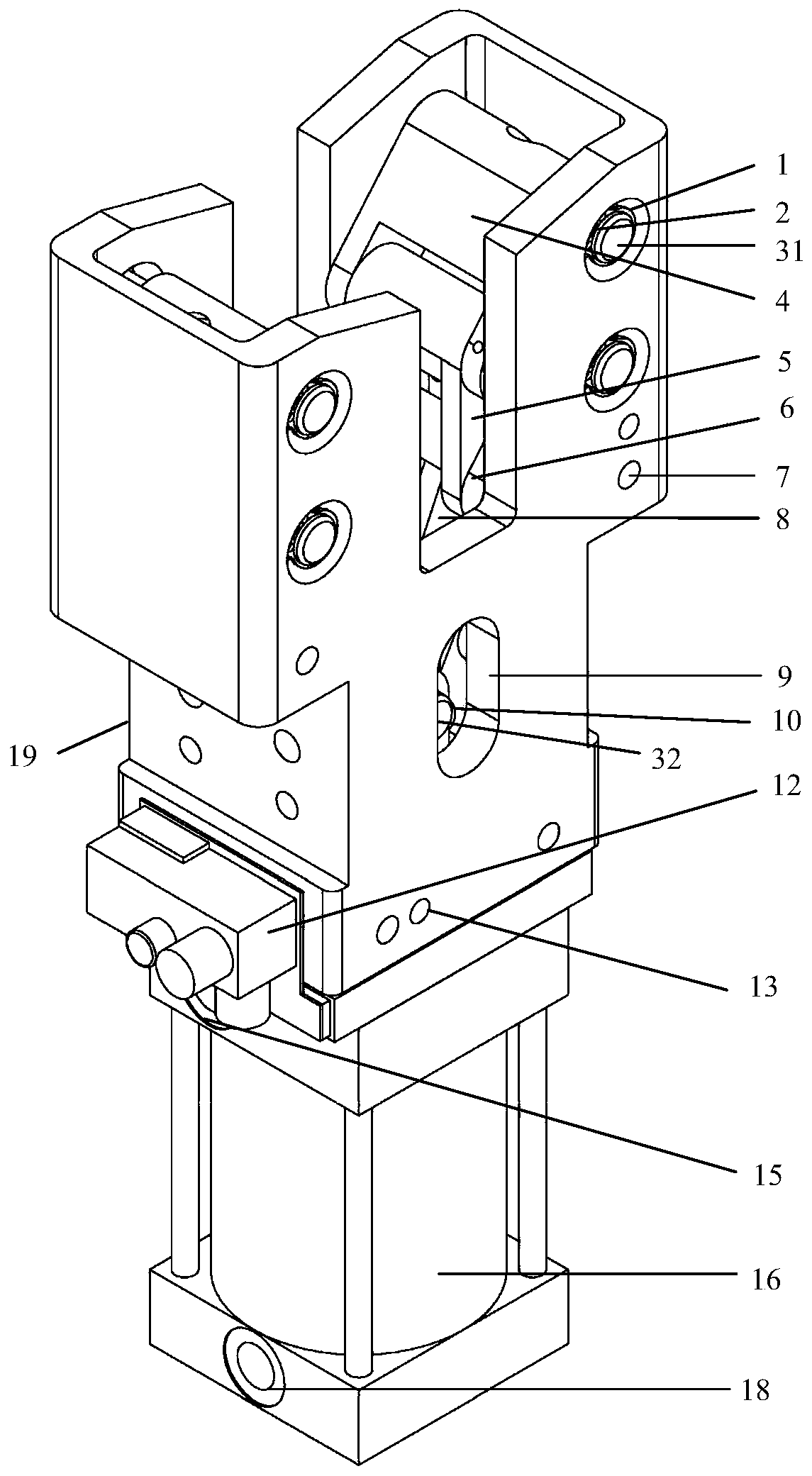
[0027] Such as Figure 1 ~ Figure 3 As shown, this embodiment provides a chute-type robot gripper for shearing plates, which includes a housing 100, a connecting rod clamping module 200, a position sensing module 300, and a driving module 400. The housing 100 is provided with interconnected connections. The rod clamping module 200 and the position sensing module 300 are connected to the driving module 400 at the lower end of the housing 100.
[0028] The upper end of the housing 100 has a symmetrical clamping structure, with pin holes 1 and sliding grooves 9, and eight pin holes 1 are arranged ve...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More