Robot motion trajectory planning system, method and device
A robot movement and trajectory planning technology, applied in manipulators, program-controlled manipulators, manufacturing tools, etc., can solve the problems of high staff requirements and low robot use efficiency, and achieve the effect of reducing technical requirements and shortening teaching time
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0028] Below, in conjunction with accompanying drawing and specific embodiment, the present invention is described further:
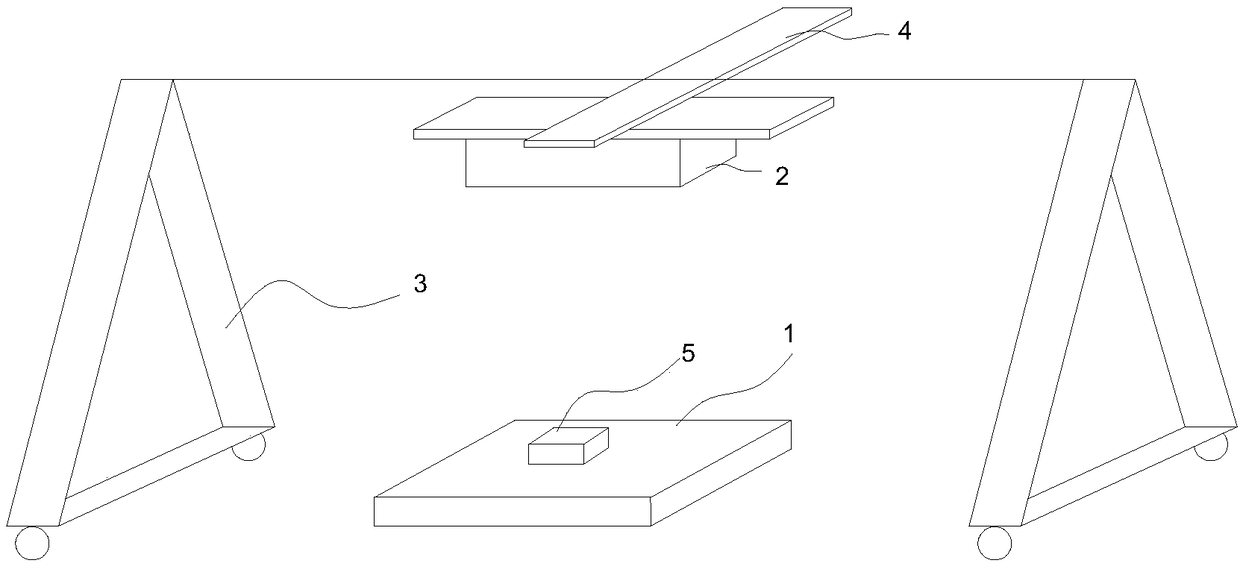
[0029] Such as figure 1 As shown, the present invention discloses a robot trajectory planning system. In order to solve the problems of time-consuming and inaccurate positioning of casting grinding robot trajectory planning, the system includes a workbench 1, a laser displacement sensor 2, a fixed frame 3 and a moving track 4. The moving track 4 is installed on the fixed frame 3, the laser displacement sensor 2 is installed on the moving track 4, the workbench 1 is used to hold the casting 5 to be scanned, the laser displacement sensor 2 is located above the casting 5, and the laser displacement sensor 2 is used to move along the X-axis and Y-axis under the drive of the moving rail 4, so as to scan the casting 5 right above to obtain the frame image of the casting 5.
[0030] In fact, the system of the present invention also includes a host computer, w...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More