Joint structure of modular mechanical arm
A technology of joint structure and manipulator, applied in the field of manipulator, can solve the problems of difficult calculation of manipulator rotation plan, unresponsiveness, few plans, etc., and achieve the effect of convenient expansion and connection, convenient interface and less electrical connection cables
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
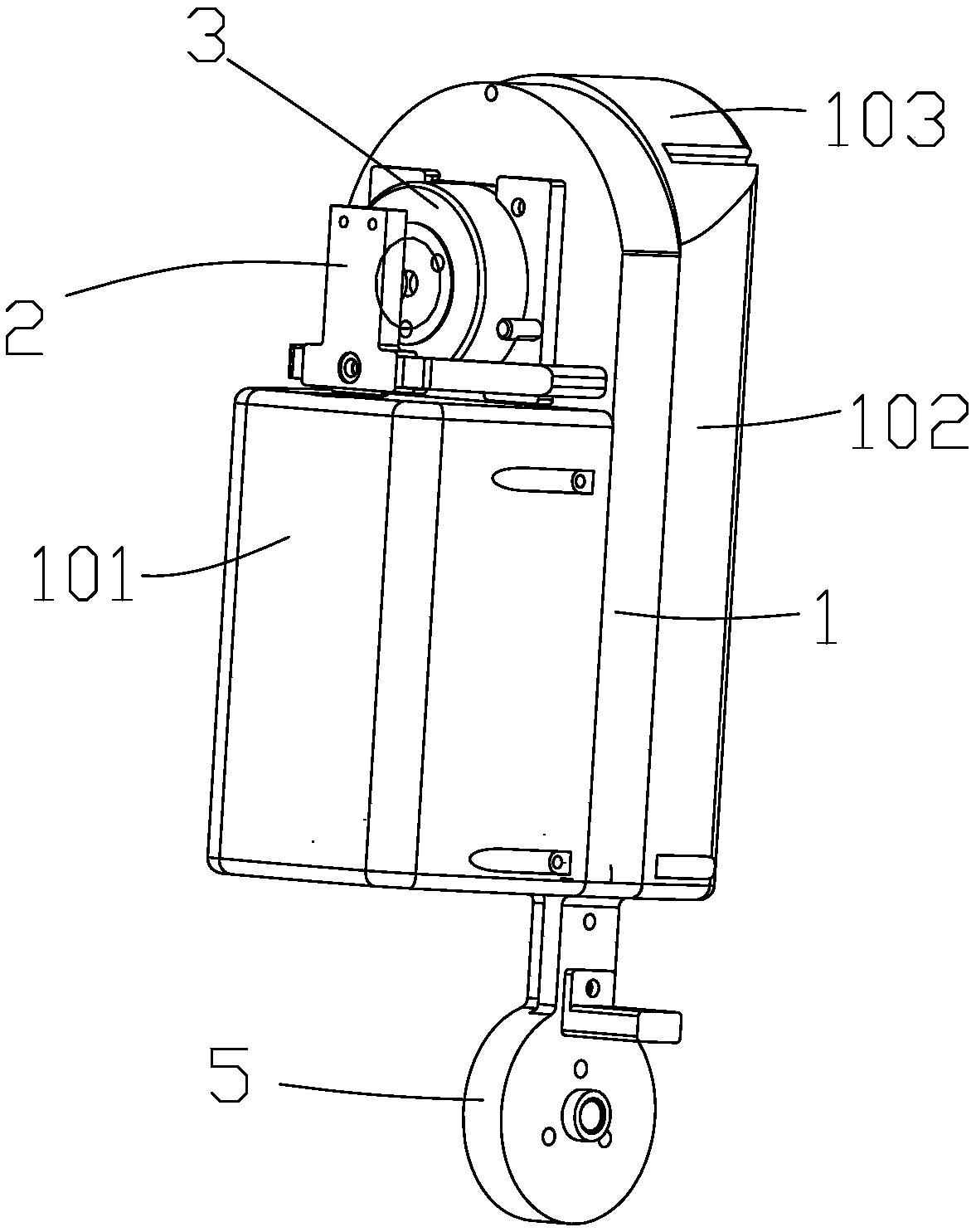
[0066] One of the joint structure implementations of a modular robotic arm of the present invention, such as Figures 1 to 5 As shown, this embodiment provides a joint structure of a modular mechanical arm, including a support frame 1, the support frame is placed longitudinally, and the upper end surface of the support frame 1 is formed as an arched connection area 11, the support The lower end surface of the framework 1 is formed as a rectangular fixing area 12, and the left and right sides of the support framework 1 are provided with joint shells respectively, and the joint shells cover the support framework 1 in a semi-closed manner, and the joint shells include a left shell 101 and the right shell 102, the left shell cavity between the left shell 101 and the support frame 1 is formed as the driving side 14 of the support frame, and the right shell cavity between the right shell 102 and the support frame 1 is formed as The linkage side 13 of the support frame;
[0067] The...
Embodiment 2
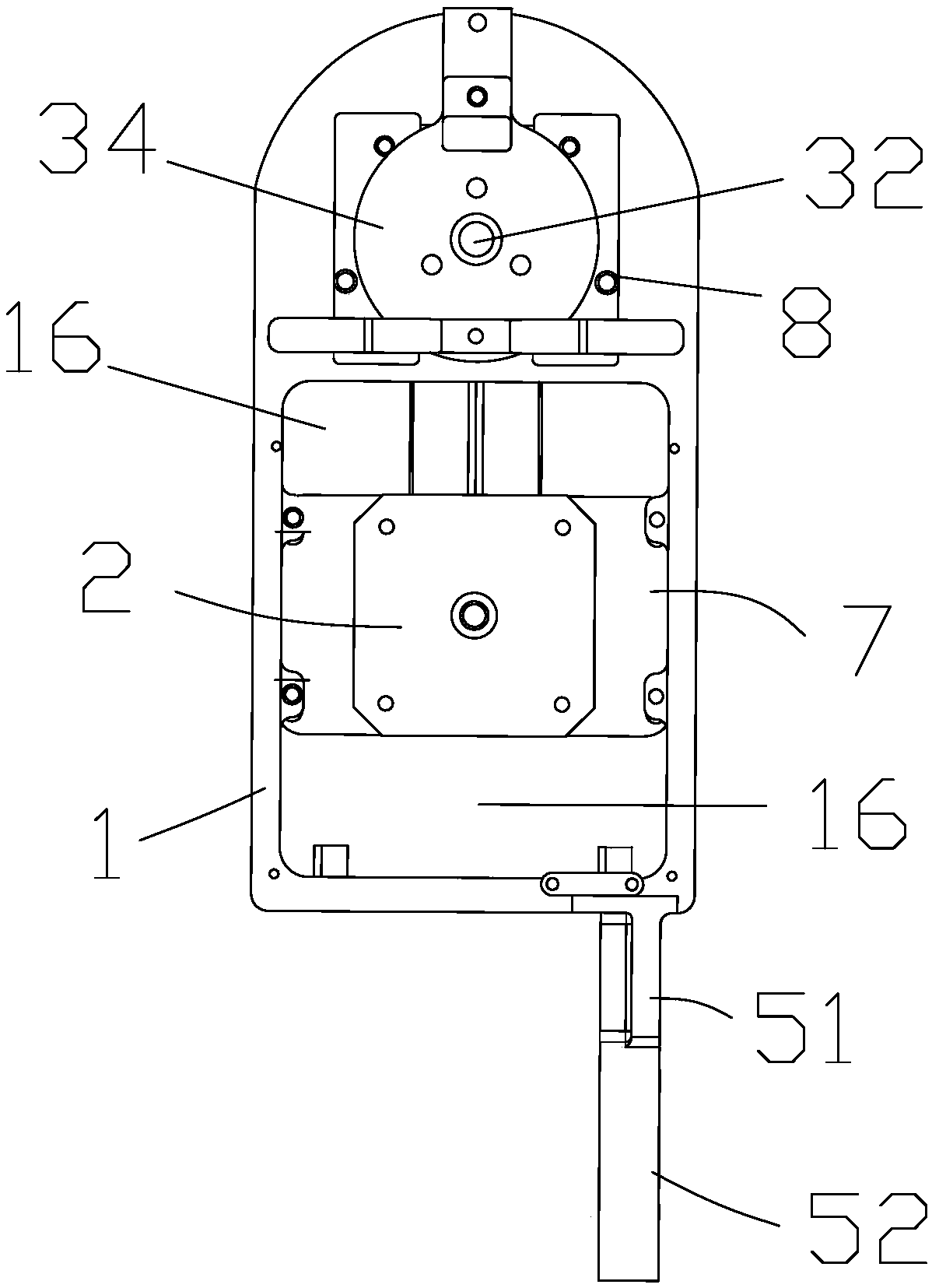
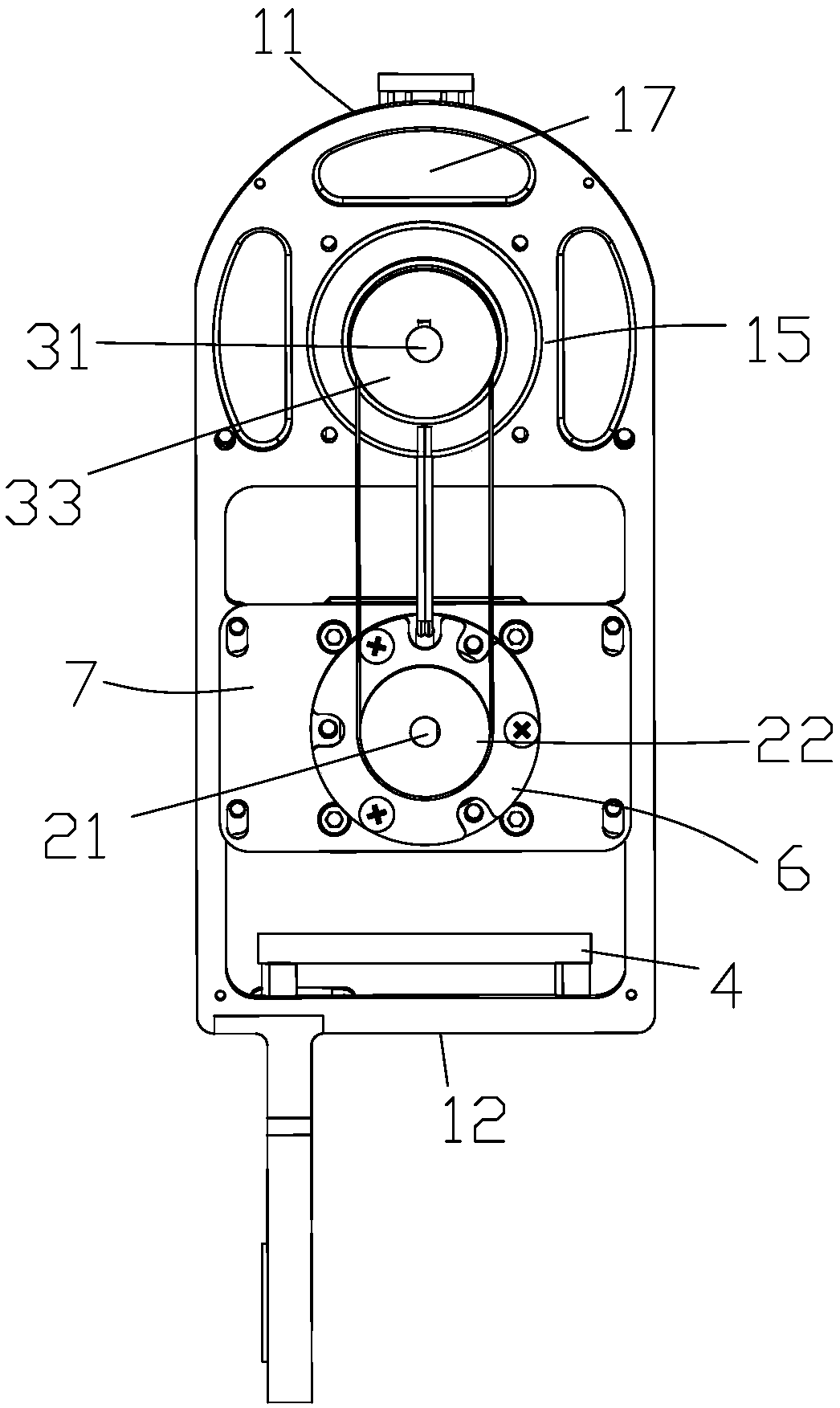
[0080] One of the implementations of the joint structure of a modular robotic arm of the present invention, such as Figures 1 to 5 As shown, the main technical solutions of this embodiment are basically the same as those of Embodiment 1, and the features not explained in this embodiment are explained in Embodiment 1, and will not be repeated here. The difference between this embodiment and Embodiment 1 is that: the supporting frame 1 is provided with a first through hole 15 and a second through hole 16 in sequence from top to bottom, and the first through hole 15 and the second through hole 16 are located on the supporting frame 1 The reducer 3 vertically passes through the first through hole 15 and is fixedly connected with the supporting frame 1 , the reducer input shaft 31 and the reducer output shaft 32 are coaxial and parallel to the driver output shaft 21 .
[0081] The first through hole 15 is a circular hole, and the supporting frame 1 around the first through hole 15...
Embodiment 3
[0085] One of the implementations of the joint structure of a modular robotic arm of the present invention, such as Figures 1 to 5As shown, the main technical solution of this embodiment is basically the same as that of Embodiment 1 or Embodiment 2, and the features not explained in this embodiment are explained in Embodiment 1 or Embodiment 2, and will not be repeated here. . The difference between this embodiment and embodiment 1 or embodiment 2 is that the connector 5 includes a connecting arm 51 and a fixing arm 52, and the upper and lower ends of the connecting arm 51 are fixedly connected to the fixing area 12 and the fixing arm 52, respectively. The fixing arm 52 is formed into a structure consistent with the shape of the mounting plate 34 and is fixedly connected with the mounting plate 34 .
[0086] The vertical distance from the axis center of the output shaft 32 of the reducer to the top of the connection area 11 is greater than the vertical distance from the cent...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More