Quad-rotor unmanned aerial vehicle with pure belt drive
A four-rotor unmanned aerial vehicle and belt transmission technology, which is applied to rotorcraft, transmission devices to drive multiple propellers, motor vehicles, etc., can solve the problems of increasing the weight of the fuselage transmission system, unsuitable maintenance, and weakened endurance. Achieve the effect of reducing the number of engines and overall body weight, facilitating maintenance and portability, and increasing battery life
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
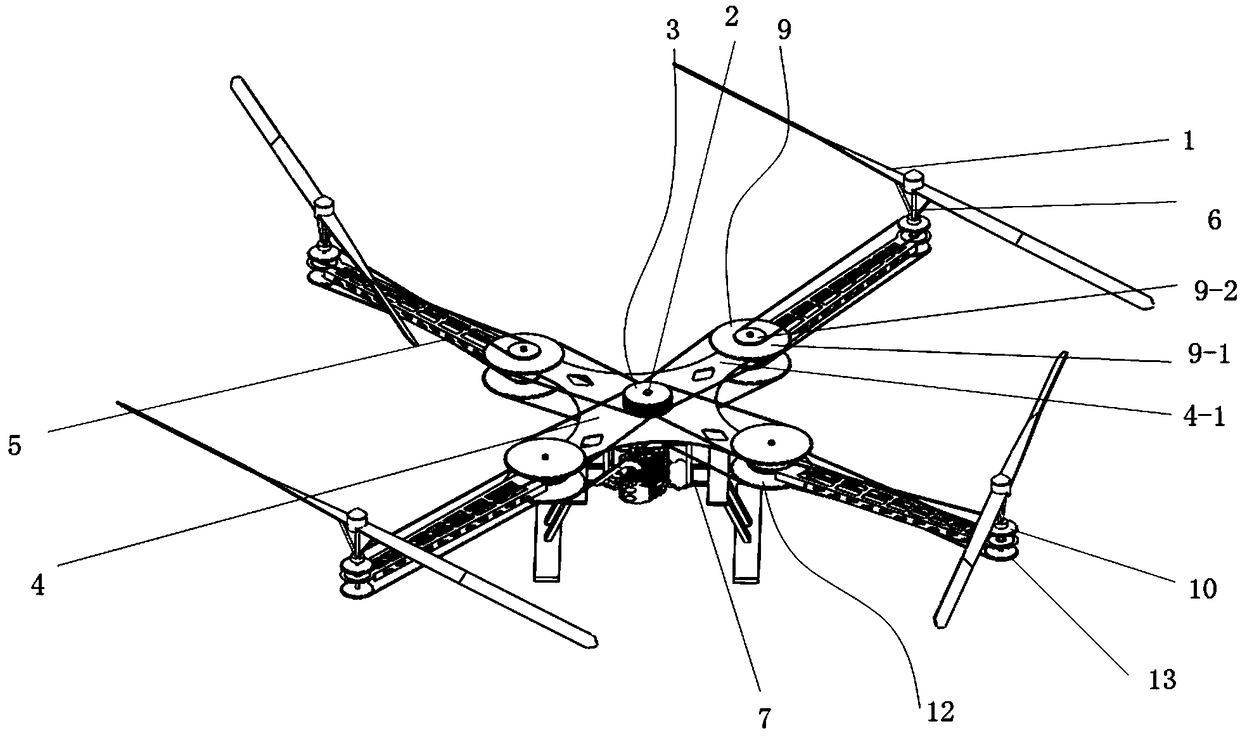
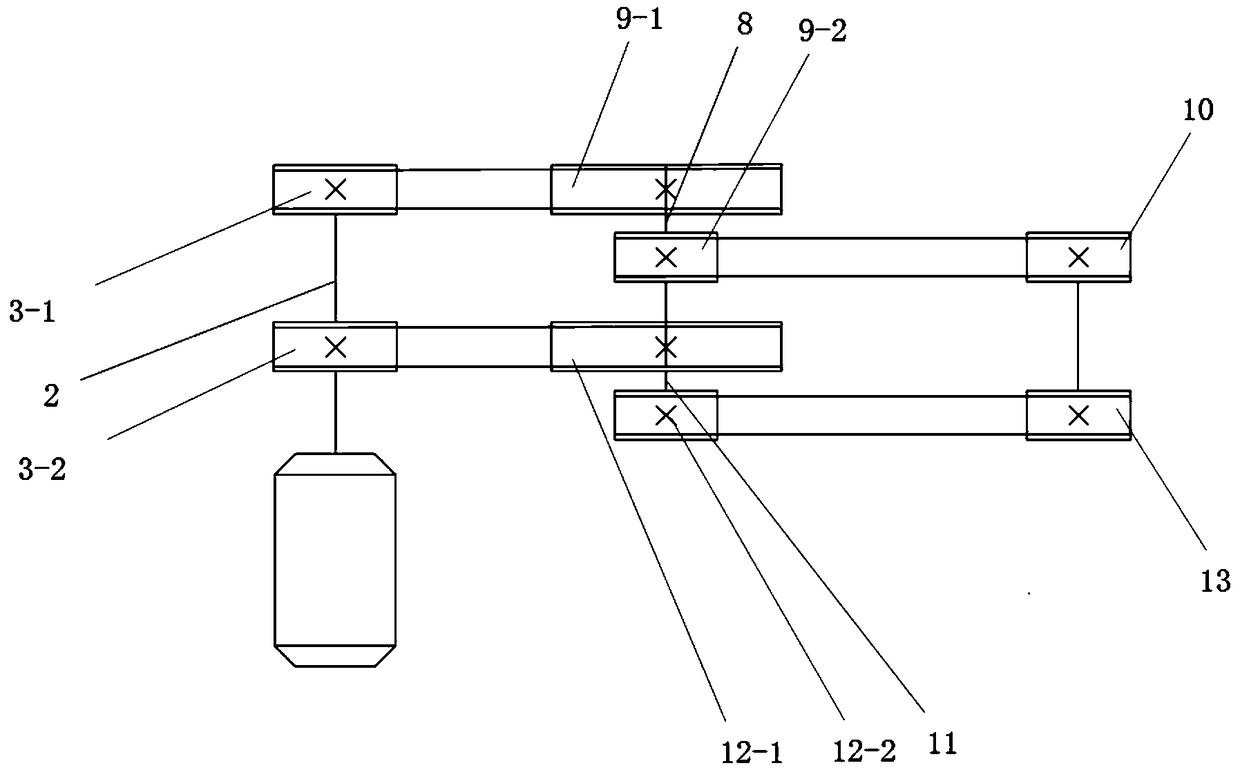
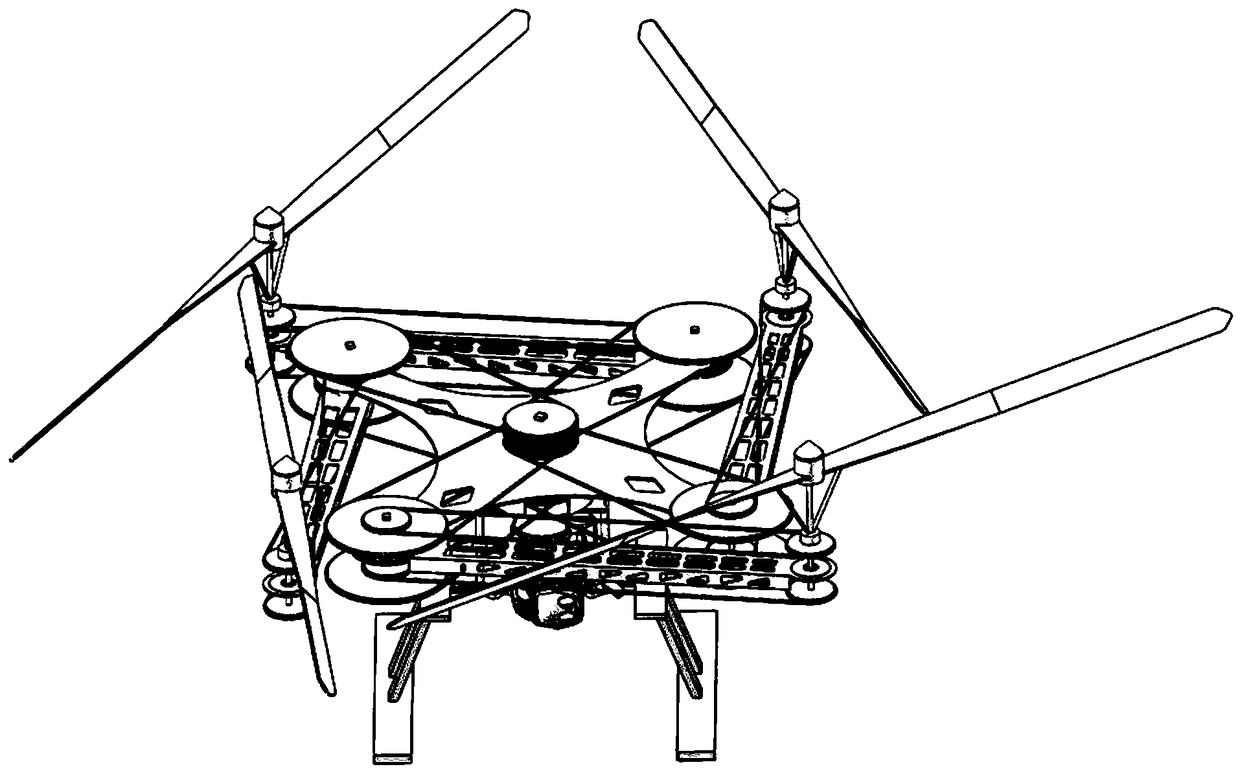
[0016] figure 1 It is a structural schematic diagram of the present invention, figure 2 It is a schematic diagram of the transmission of the single-group pure belt transmission assembly of the present invention, image 3 It is a structural schematic diagram (top view) after folding of the present invention, Figure 4 It is a schematic diagram (bottom view) of the folded structure of the present invention, as shown in the figure: a four-rotor UAV with pure belt transmission in this embodiment includes a body, a driving device arranged on the body, and a four-rotor wheel mounted on the body in rotation. The pure belt transmission system between the rotor 1 and the transmission connection drive device and the rotor 1, the pure belt transmission system includes four groups of pure belt transmission components, and each group of pure belt transmission components is connected to each rotor 1 in a one-to-one corresponding manner. Between the driving device and the rotor 1, the dri...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More