

Cable control system and cable control method for a wading robot
A control method and control system technology, applied in the field of cable control system, can solve problems such as entanglement between umbilical cables and underwater obstacles, power consumption of wading robots, and increase of self-weight of wading robots, so as to achieve accurate release, effective use, Flexible means and diverse effects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
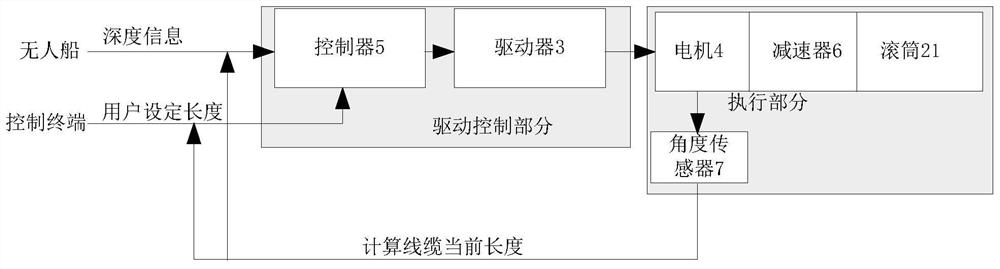
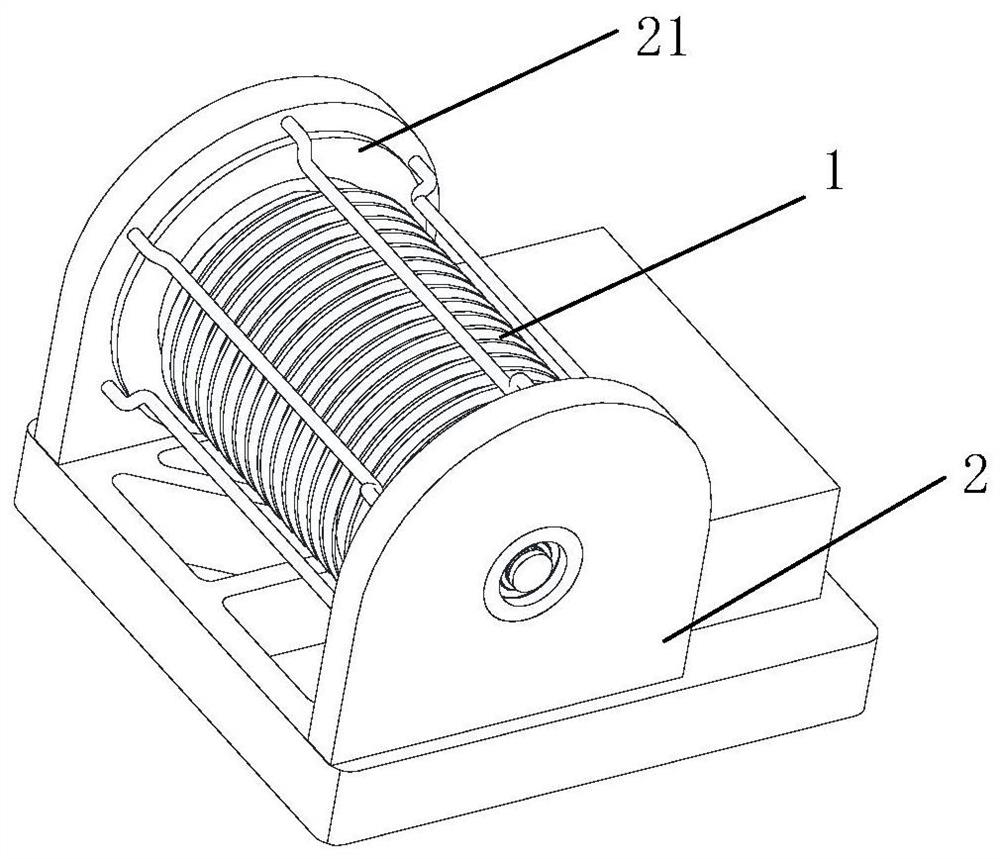
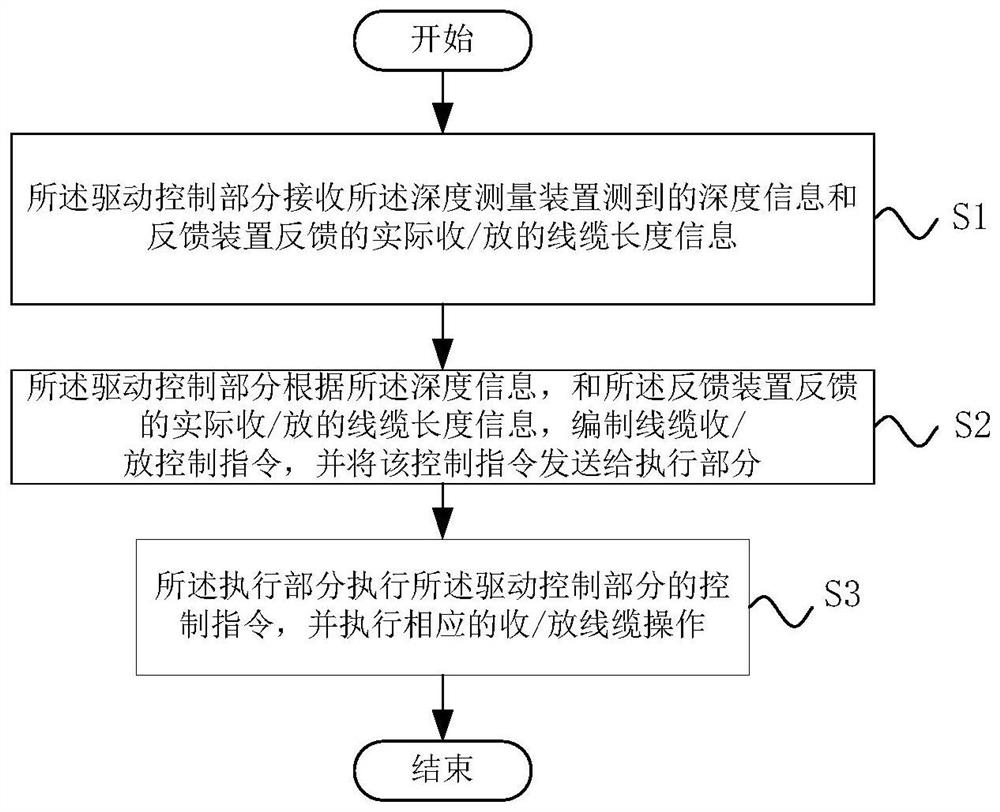
[0044] like figure 1 and figure 2As shown, the embodiment of the present invention proposes a cable control system for a wading robot, which is used to control the retraction / release of the cable, including a drive control part and an execution part electrically connected, and the drive control part It includes a controller 5 and a driver 3 that are electrically connected. In this system, the base station of the wading robot floats on the water surface or is installed on the ground, and the wading robot and the base station are connected by cables, and at least the motor 4, the roller 21 and the angle sensor 7 in the execution part are installed on the on the base station.
[0045] The controller 5 is electrically connected to the depth measuring device on the wading robot, and the depth measuring device sends the underwater depth value of the wading robot to the controller 5 . The controller 5 first sets the depth value as the length of the cable that should be released a...
Embodiment 2
[0054] The difference between this embodiment and Embodiment 1 is that in this embodiment, the controller 5 calculates the target value of the motor rotation angle according to the length value preset by the user. The preset length value is fixedly set in the controller 5 by the user before the wading robot is launched into the water, so as to realize the automatic retracting / releasing operation of the cable when the wading robot is sailing at a fixed depth.
Embodiment 3
[0056] The difference between this embodiment and the above embodiments is that in this embodiment, the controller 5 calculates the target value of the motor rotation angle according to the length value input by the user. In this embodiment, the length value is input by the user's control terminal, and the control terminal includes but is not limited to a control terminal with an input device wired to the controller, or a wireless input terminal / terminal that communicates wirelessly with the controller. Tablet PC / smart phone / remote controller (at this time, a wireless communication module is arranged in the controller, and the communication with the wireless input terminal and other devices is realized through the wireless communication module).
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More