Mobile robot sonar data fusion method based on DSmT theory
A mobile robot and data fusion technology, applied in the computer field, can solve the problems of affecting the output results, the reliability of the fusion results, and the large impact of the accuracy output results, so as to achieve the effect of not affecting the reliability, reducing the amount of calculation, and effectively identifying
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
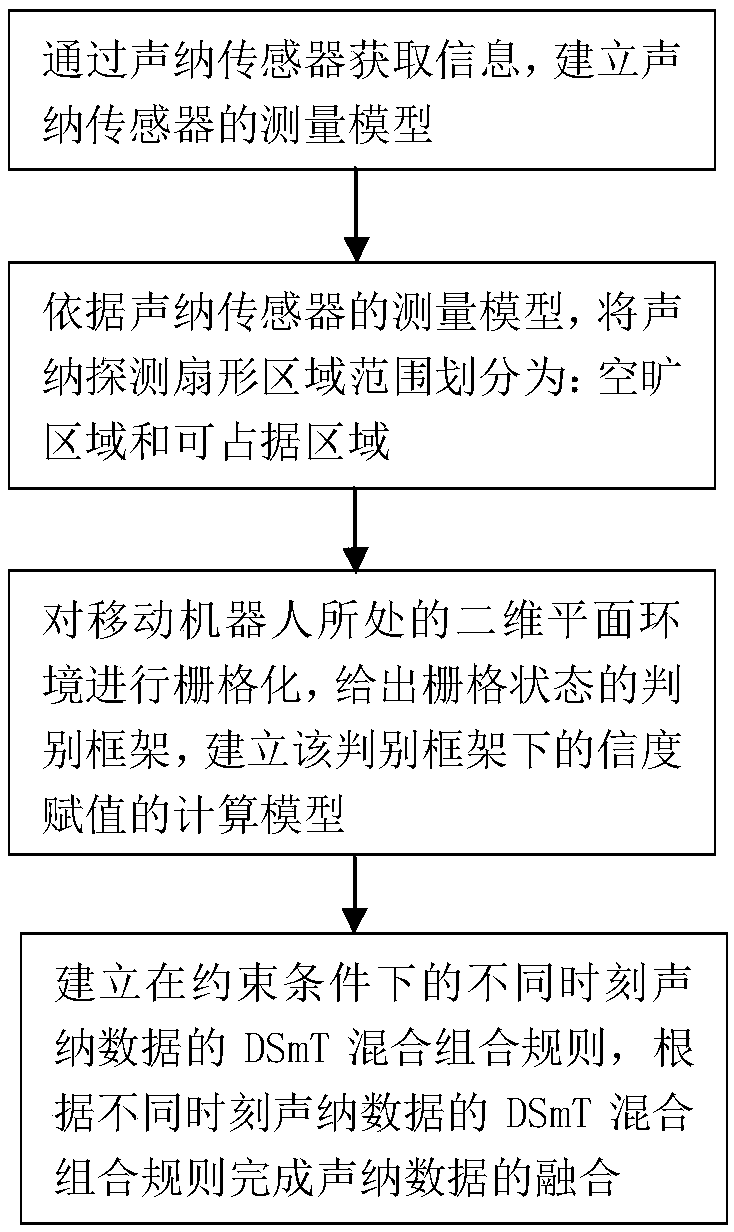
[0030] In sonar-based map creation, due to the strong uncertainty of sonar information, multiple sonar sensors are required to acquire information at different times and fuse multiple sonar information. At the present stage, the application of information fusion technology is mainly in the military field. Modern warfare has widely used various high-tech. Multi-sensor and multi-source information systems must be used to obtain more battlefield information. Its data processing capacity and processing capacity far exceed that of a single sensor. With the continuous increase in the types and quantities of sensors, multi-sensor information fusion technology has been widely used. In addition, information fusion technology has gradually penetrated into many fields. In the field of mobile robots, the application of information fusion technology is increasingly widespread, but there are still many problems, such as the inability to complete the processing of conflicting data, for exam...
Embodiment 2
[0044] The mobile robot sonar data fusion method based on DSmT theory is the same as embodiment 1, and the DSmT mixing and combination rule of sonar data at different times under the constraints described in step 4 refers to multiple different data sets loaded by the mobile robot body. The combined reliability of the grid state acquired by the sonar sensor in the direction under empty, obstacle and unknown conditions together form a new combined reliability, and combine the new combined reliability with the non-empty feature function Multiply to get the reliability assignment of the raster.
[0045] The classic combination rules of DSmT theory do not have any constraints, but in the process of actual evidence information fusion, most of them have constraints. The mixed combination rules of DSmT theory solve this problem. It has a set of constraints, which is more suitable for the actual fusion. need. Map information is the collection of all grid state information, assigning ...
Embodiment 3
[0047] The mobile robot sonar data fusion method based on DSmT theory is the same as embodiment 1-2, the DSmT mixing and combination rules of sonar data at different times under the constraints described in step 4, the specific reliability fusion results and each combination The calculation formulas of the rules are:
[0048]
[0049]
[0050]
[0051]
[0052] Among them, m 1 ( ) and m 2 (·) assigns the basic reliability from two different data sources, m μ (Ω)(C) represents the reliability fusion result with constraints, μ is the constraint condition E∩O=Φ, where Φ is the absolute empty set, C∈D Ω , is a non-empty characteristic function, if but The value is '0', otherwise it is '1', is the constraint condition set, Φ represents the absolute empty set, Indicates the relative empty set condition. In the above formula, S 1 (C) is the DSmT combination rule without any constraints, S 2 (C) is to assign all the combined reliability assignments of the ab...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com