

An adjustable passively stabilized mechanical foot
A passively stabilized, mechanical foot technology, applied in motor vehicles, transportation and packaging, etc., can solve the problems of poor adaptability to rough terrain and single foot structure, and achieve the effect of strong adaptability and good stability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0020] In order to make the technical problems, technical solutions and advantages to be solved by the present invention clearer, the following will describe in detail with reference to the drawings and specific embodiments.
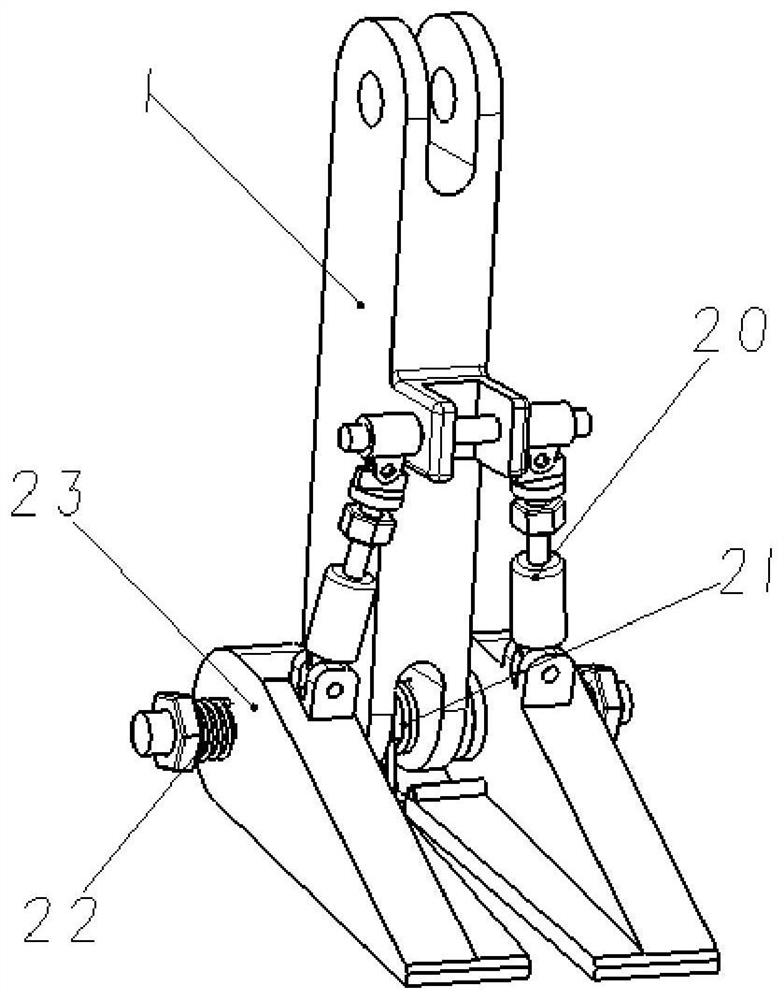
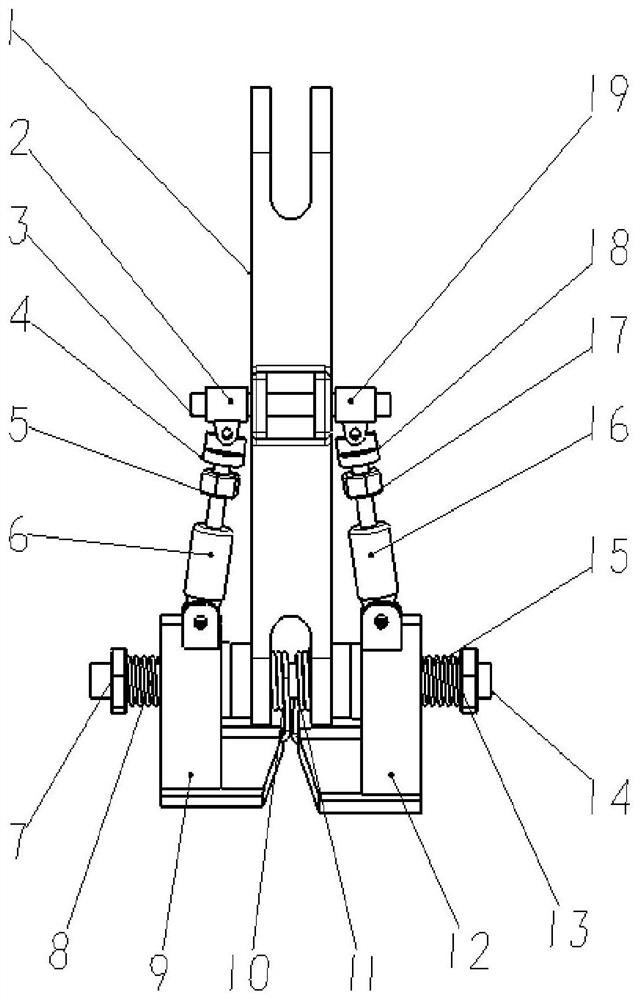
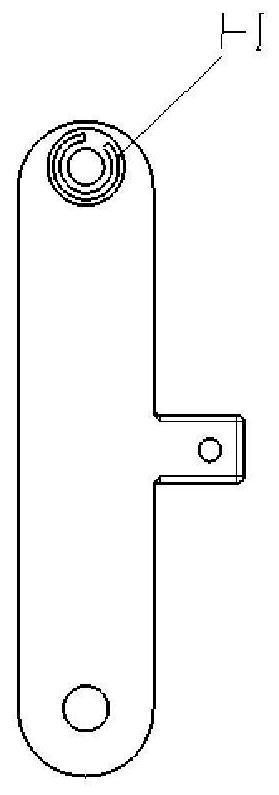
[0021] An adjustable passive and stable mechanical foot has a symmetrical structure as a whole, consisting of a mounting pillar 1, a left foot 9, and a right foot 12. Take the left side of the mechanical foot as an example: a passive anti-slip adjustment device 23 is provided at the joint between the bottom of the installation pillar 1 and the left foot 9, and the passive anti-slip adjustment device 23 includes a spiral step platform 9-I arranged on the left foot 9 and a Install the spiral stepped groove 1-I on the pillar 1, and the spiral stepped groove is matched with the spiral stepped platform, so that when the left foot and the mounting pillar are relatively rotated, the palm of the foot will be pushed to slide to both sides. Buffer adjustment devic...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More