

Pose computation method for point cloud position of non-cooperative target
A non-cooperative target and calculation method technology, applied in the field of non-cooperative target point cloud position and attitude calculation, can solve the problems of non-cooperative target point cloud acquisition, scanning range limitation, and inability to obtain accurate solutions, etc., to achieve high attitude accuracy , calculation flexibility, high precision effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
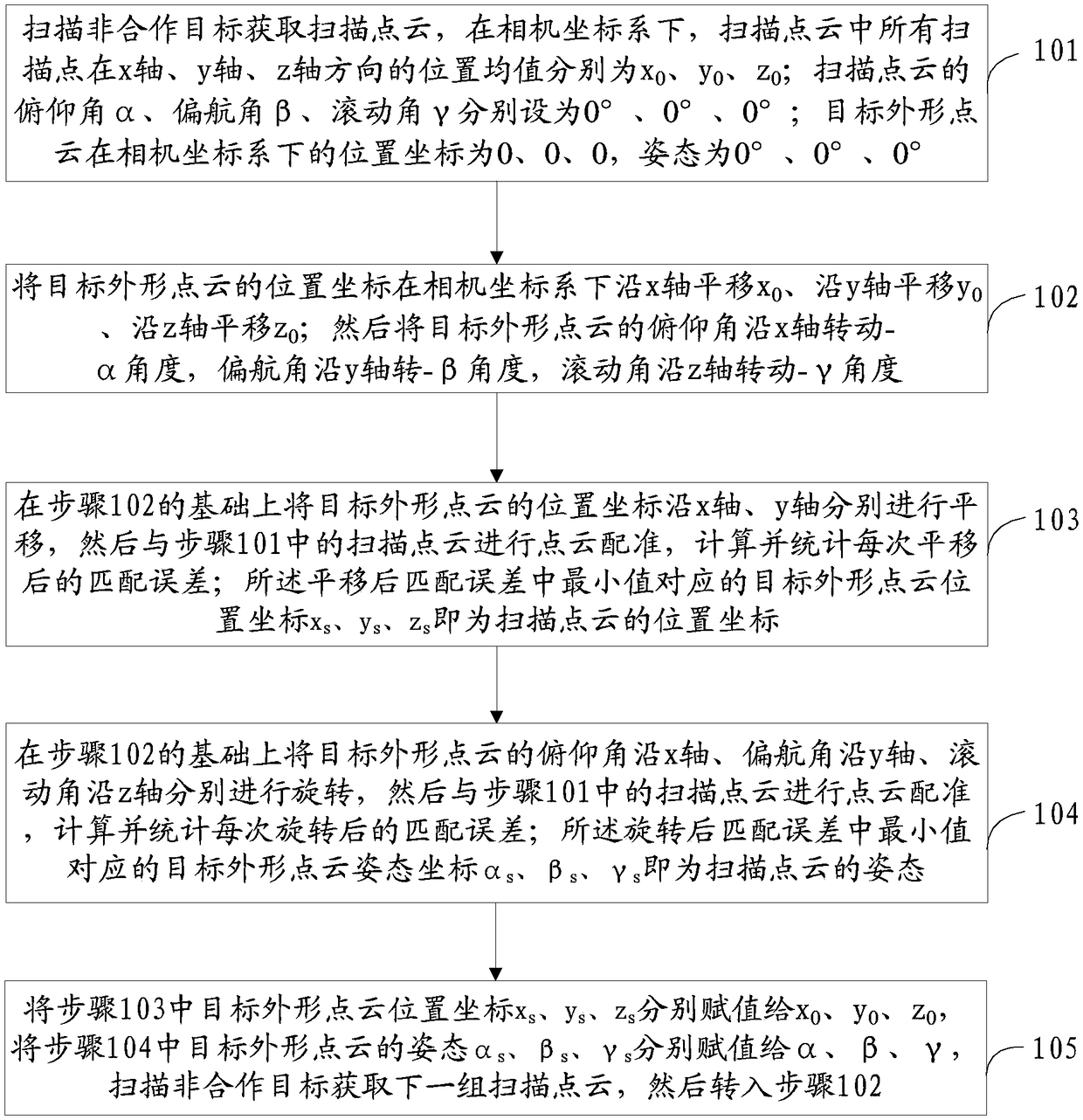
[0060] Step (1), scan the non-cooperative target to obtain the scanned point cloud, and in the camera coordinate system, obtain the mean values of the positions of all scanned points in the scanned point cloud in the x-axis, y-axis, and z-axis directions respectively x 0 、y 0 ,z 0 , and at the same time set the roll angle α, yaw angle β, and pitch angle γ of all scan points of the scan point cloud to 0°, 0°, and 0°, respectively. The target shape point cloud is stored in the processor memory for registration with the scanned point cloud. The position coordinates of the target shape point cloud in the camera coordinate system are 0, 0, 0, and the attitude is 0°, 0°, 0°.
[0061] Step (2), translate the position coordinates of the target shape point cloud along the x-axis in the camera coordinate system by x 0 , translate y along the y axis 0 , translate z along the z axis 0 , and then rotate the pitch angle of the point cloud of the target shape along the x-axis by a -α a...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More