

A flight control method for a drone, a drone, and a machine readable storage medium
A technology of flight control and drones, applied in the field of drones, can solve problems such as unfriendly operation experience and cumbersome operation process, and achieve the effects of avoiding the risk of crashes, reducing occupancy, and improving user experience
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
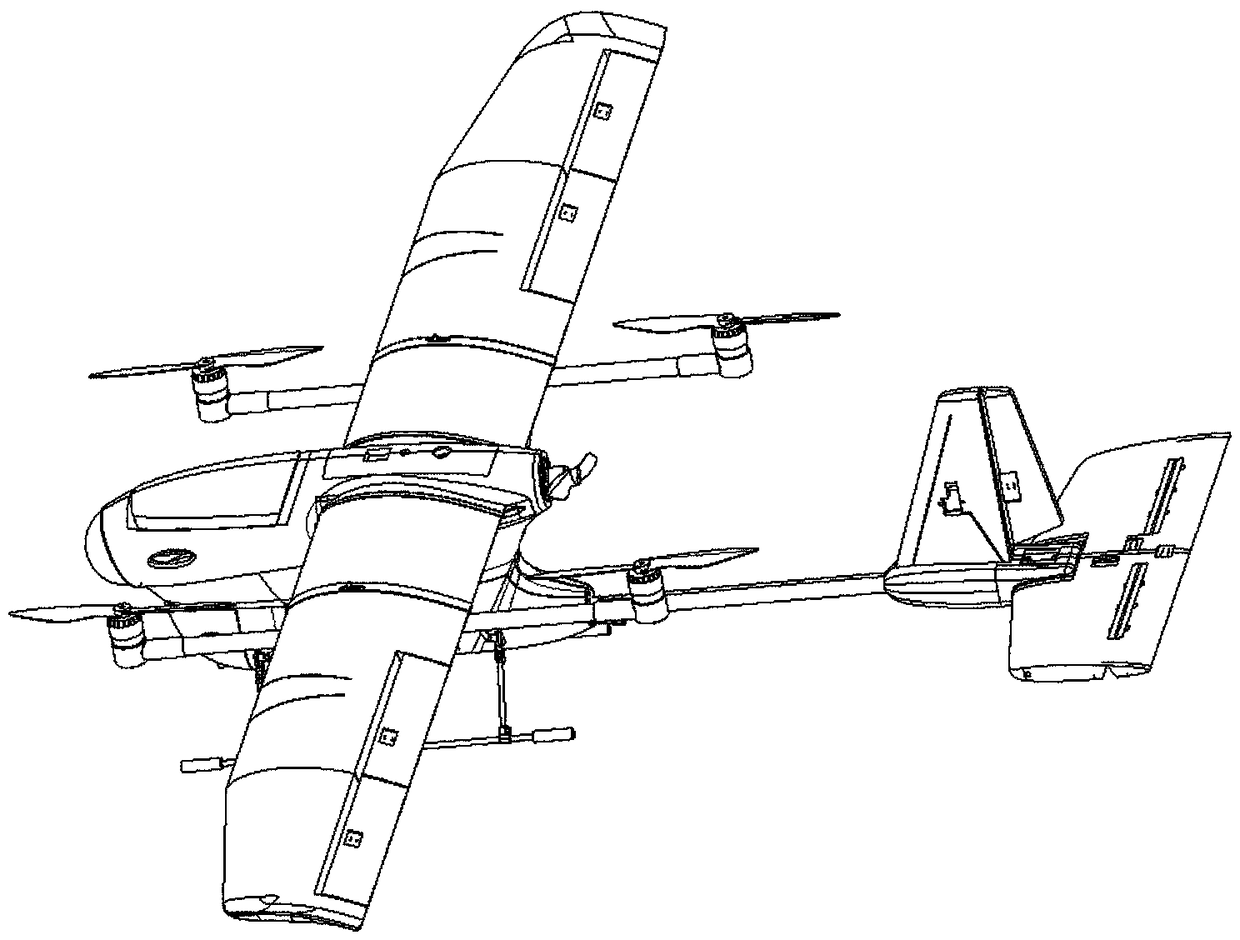
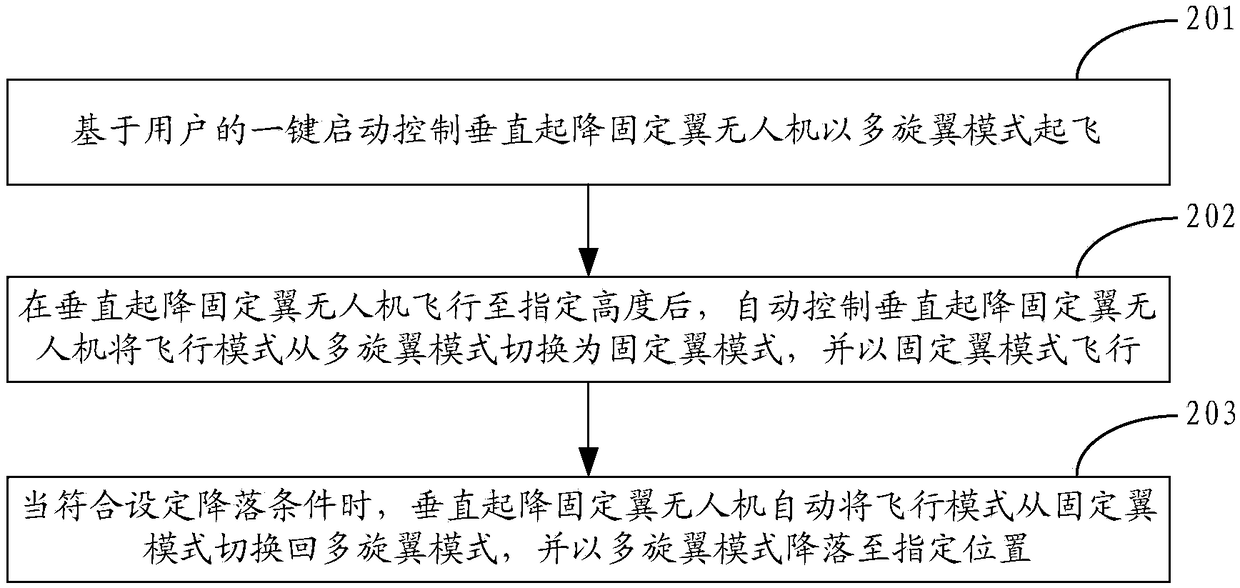
[0050] See figure 2 , is a flow chart of an embodiment of the flight control method of the unmanned aerial vehicle of the present invention, and the method can be applied to a vertical take-off and landing fixed-wing unmanned aerial vehicle, comprising the following steps:
[0051] Step 201: The vertical take-off and landing fixed-wing UAV takes off in multi-rotor mode based on the user's one-key start control.
[0052] In one embodiment, before the user controls the vertical take-off and landing fixed-wing UAV to take off, he can first set some flight parameters for the vertical take-off and landing fixed-wing UAV, such as speed, altitude, flight route, etc., and can also Do the necessary inspection work, such as checking whether the power is normal, checking whether the sensors are normal, checking whether the anemometer is normal, etc. After everything is ready, the user can operate through external devices, such as remote control, to control the vertical hoist. The fixed...
Embodiment 2
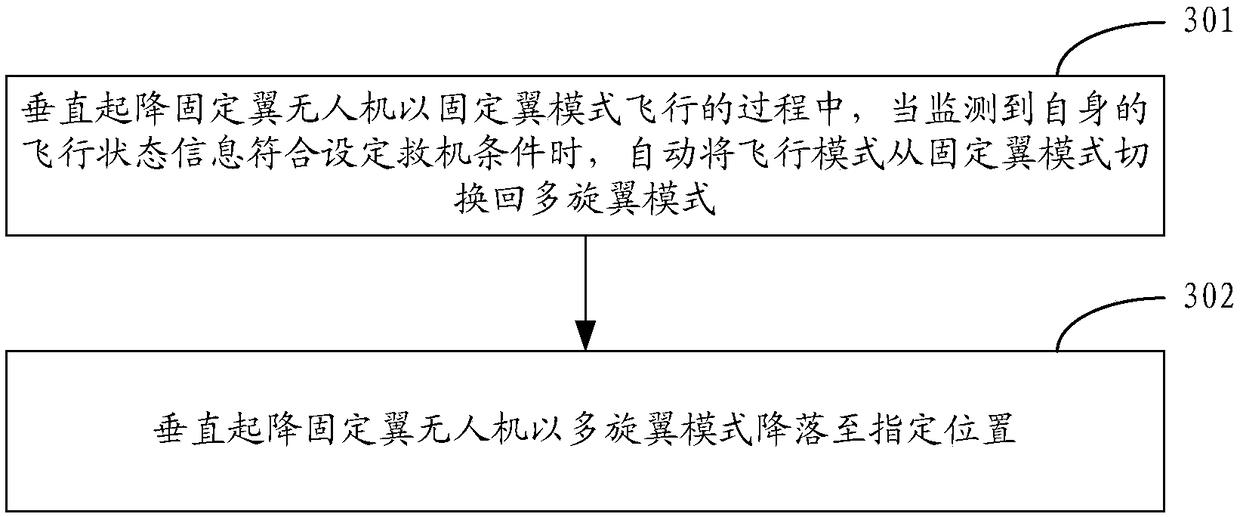
[0072] See image 3 , is a flow chart of an embodiment of the flight control method of another unmanned aerial vehicle of the present invention, the method can be applied to a vertical take-off and landing fixed-wing unmanned aerial vehicle, comprising the following steps:
[0073] Step 301: During the flight process of the vertical take-off and landing fixed-wing UAV in fixed-wing mode, when it detects that its own flight status information meets the set rescue conditions, automatically switch the flight mode from fixed-wing mode to multi-rotor mode.
[0074] In one embodiment, the vertical take-off and landing fixed-wing UAV can monitor its own flight status information in real time during the flight mission in fixed-wing mode. The flight status information mentioned here can include attitude angle and flight altitude.
[0075] Correspondingly, in an embodiment, setting rescue conditions may include at least one of the following: the attitude angle of the vertical take-off a...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More