

Route planning method for moving carrier
A mobile vehicle and path planning technology, applied in the field of navigation, can solve problems such as changes in the original planned route, reduced work efficiency and quality of mobile vehicles, and lack of unified planning for the travel path of mobile vehicles.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
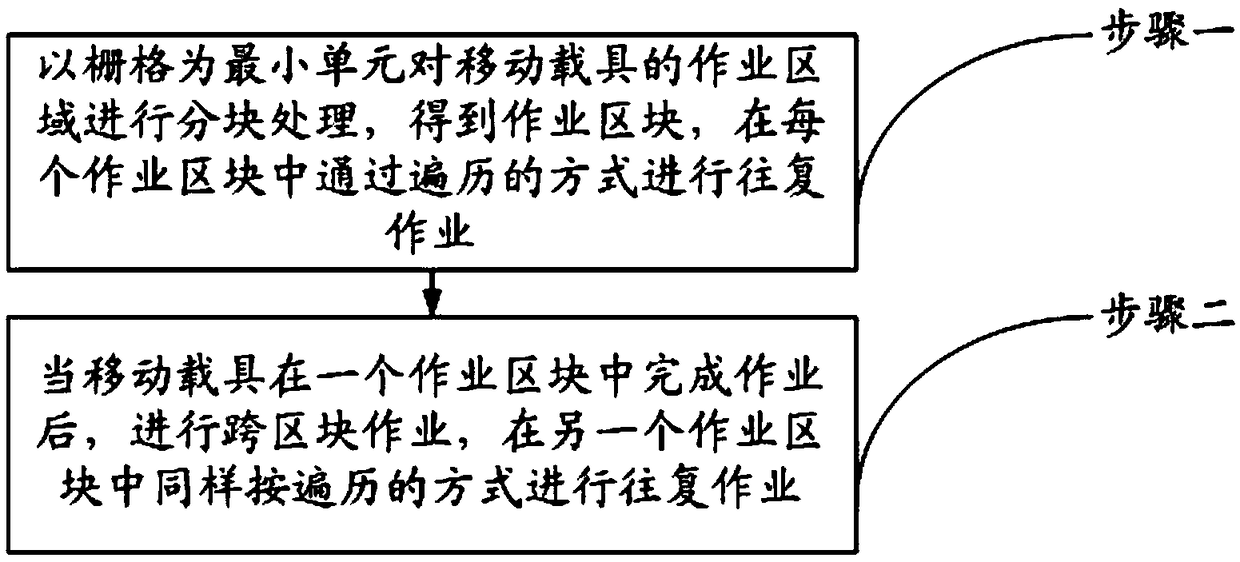
[0046] The present invention provides a path planning method for mobile vehicles, such as figure 1 As shown, the path planning method includes:
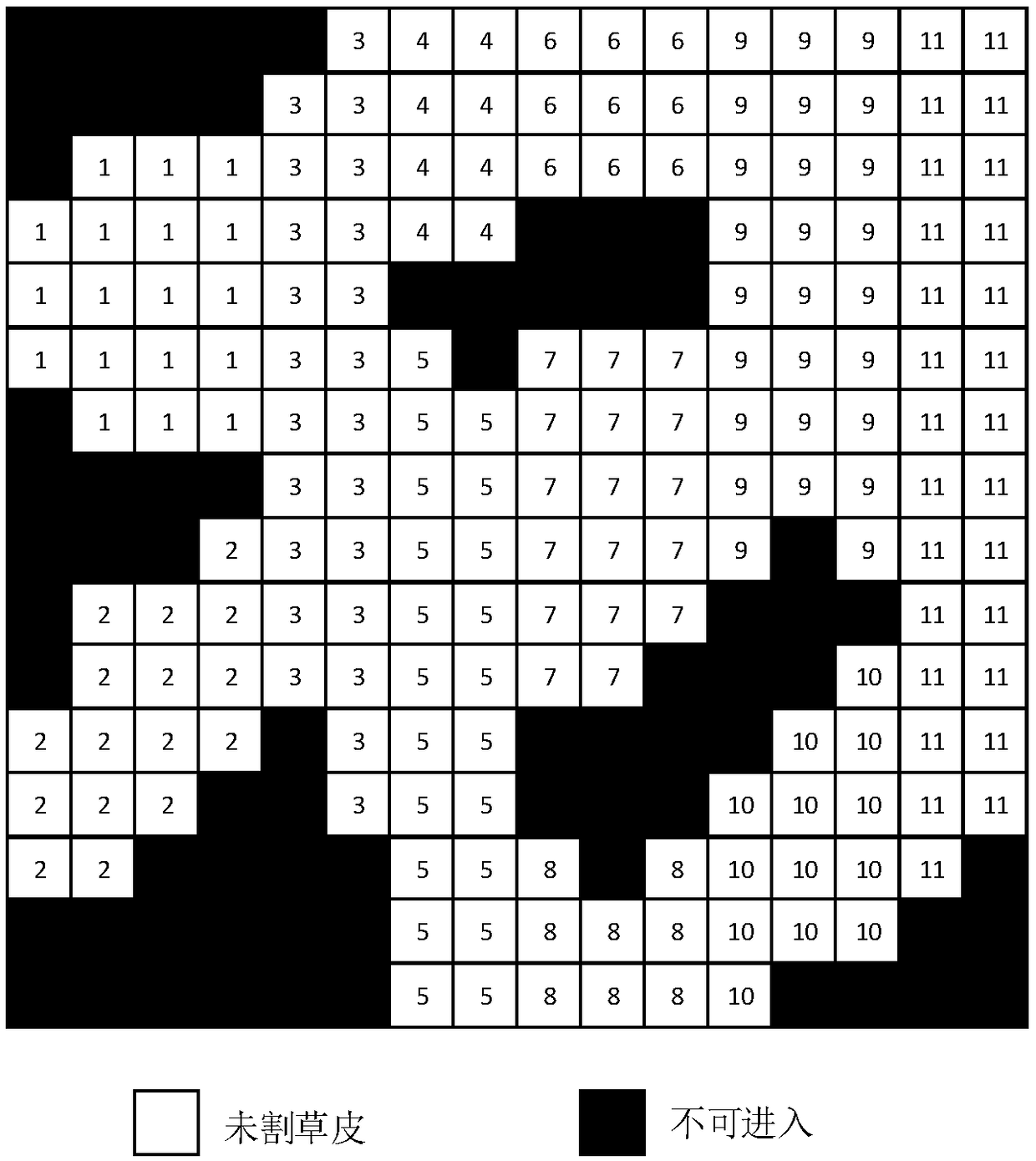
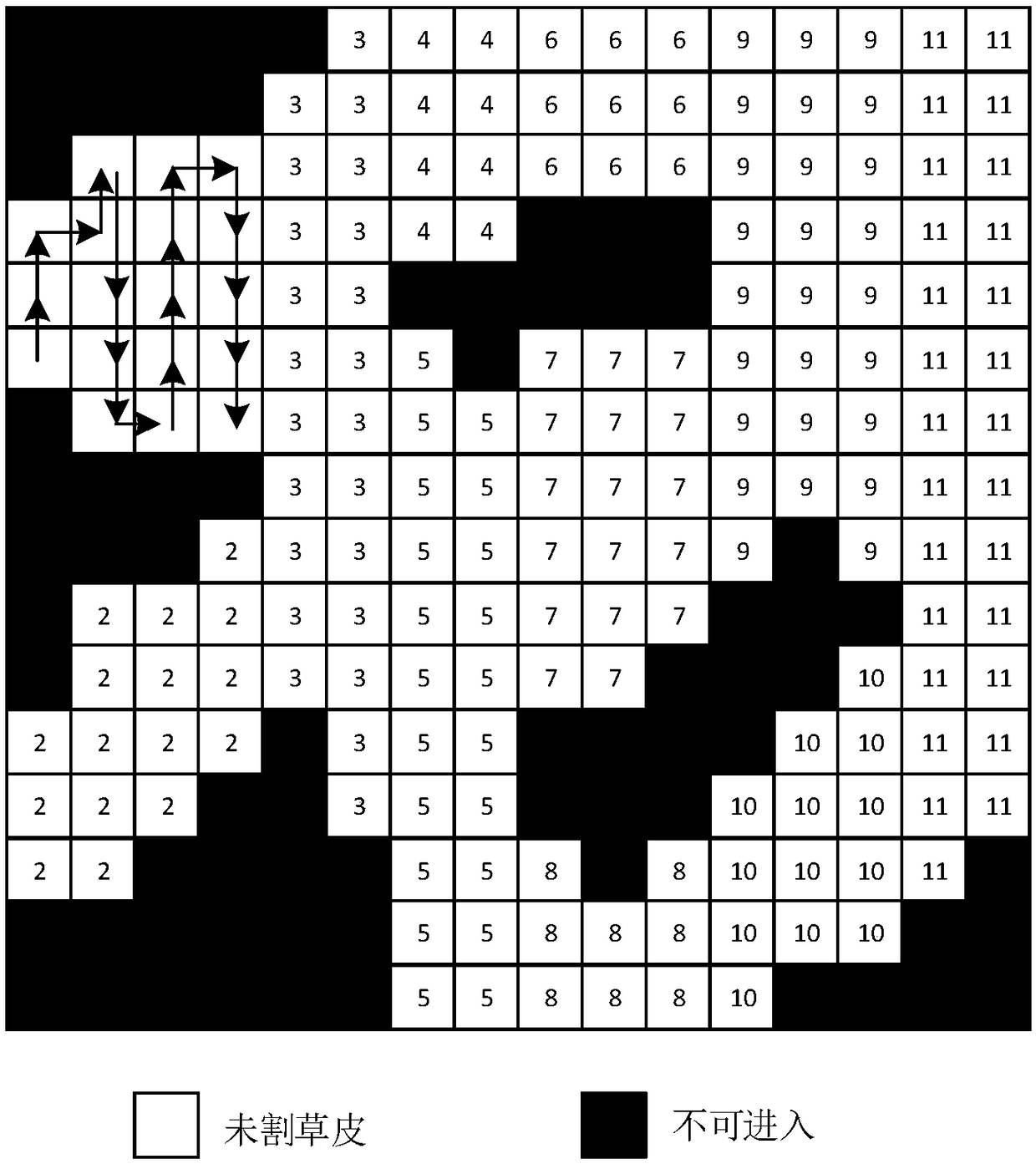
[0047] Step 1, divide the work area of the mobile vehicle into blocks with the grid as the smallest unit to obtain work blocks, and perform reciprocating operations in each work block by traversing;
[0048] Step 2, after the mobile vehicle completes the operation in one operation block, it performs cross-block operation, and performs reciprocating operation in another operation block in the same way as traverse;
[0049] Among them, detour processing is adopted for existing obstacles during the operation of each operation block.
[0050] The present invention proposes a path planning method for a mobile vehicle, which enables the mobile vehicle to obtain a plurality of operation blocks through a block segmentation algorithm based on an electronic grid map of known information, and within each operation block The job path inside ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More