

Aircraft position determination method based on motion recovery structure
A technology for motion recovery structure and determination method, applied in the field of aerospace, can solve problems such as accumulated errors, difficult installation and use, and expensive precision instruments
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0039] The specific embodiments of the present invention will be described in detail below with reference to the accompanying drawings, but it should be understood that the protection scope of the present invention is not limited by the specific embodiments.
[0040] Unless expressly stated otherwise, throughout the specification and claims, the term "comprising" or its conjugations such as "comprising" or "comprising" and the like will be understood to include the stated elements or components, and Other elements or other components are not excluded.
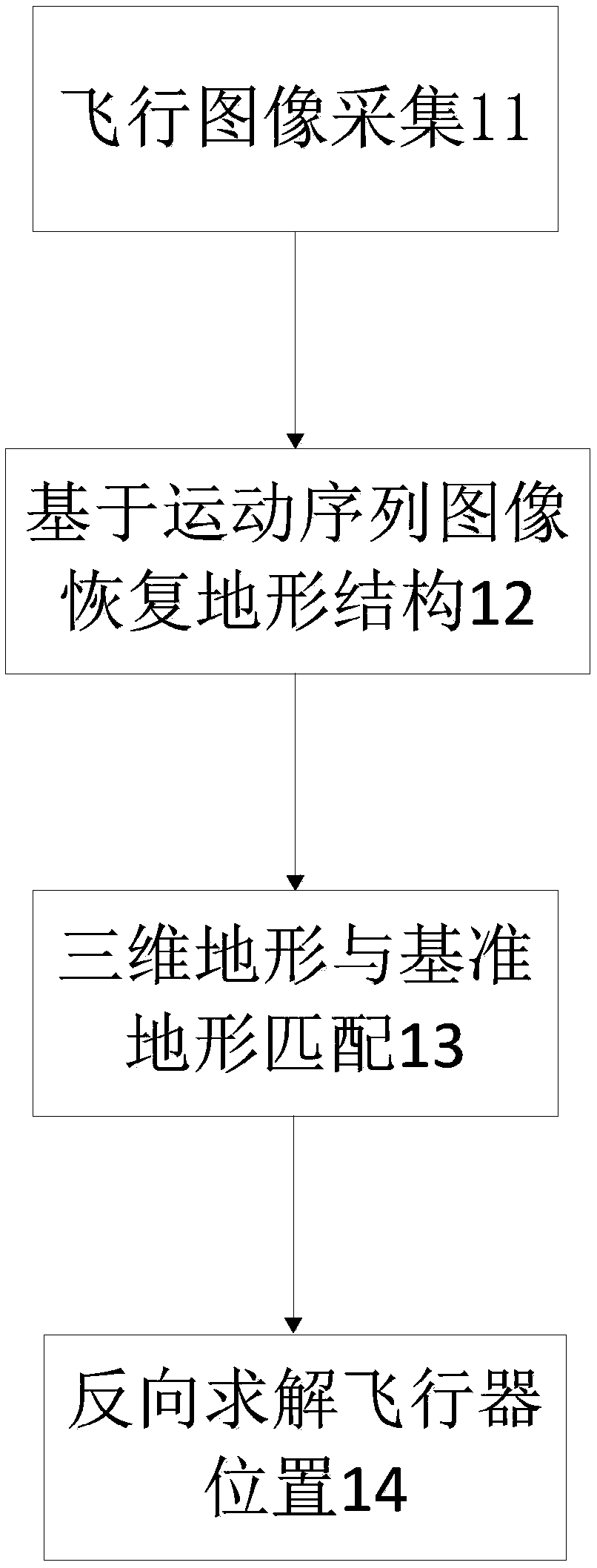
[0041] The basic principle of the aircraft position determination method based on the recovery structure from motion is to use the imaging sensor mounted on the aircraft to continuously image the terrain under the track during the flight, and form multi-view imaging of multiple positions for each area. The multi-view geometry principle uses the method of recovering the 3D structure of the scene from the motion camera in compute...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More