

Control method of omnidirectional walking training device
A walking training and control method technology, which is applied in the direction of equipment to help people walk, physical therapy, etc., can solve problems such as difficulty in ensuring control accuracy, difficulty in system control, and no consideration, and achieve good training effects, high safety, and good stability. sexual effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
no. 1 example
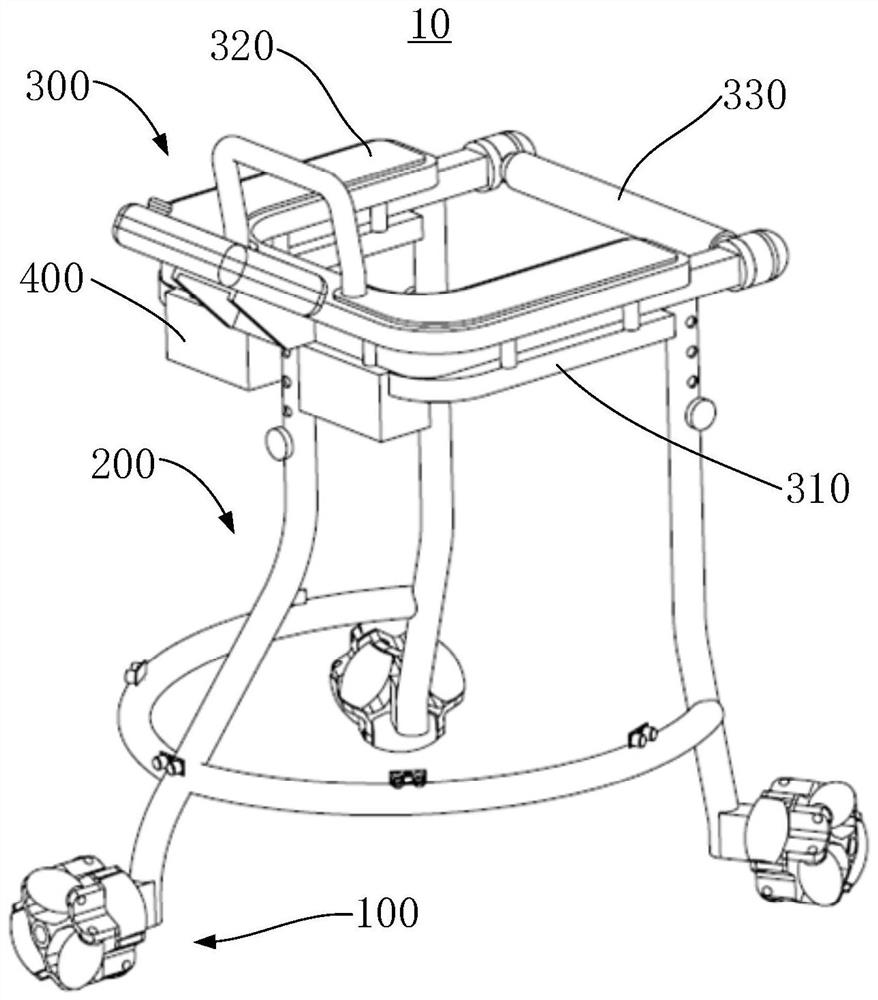
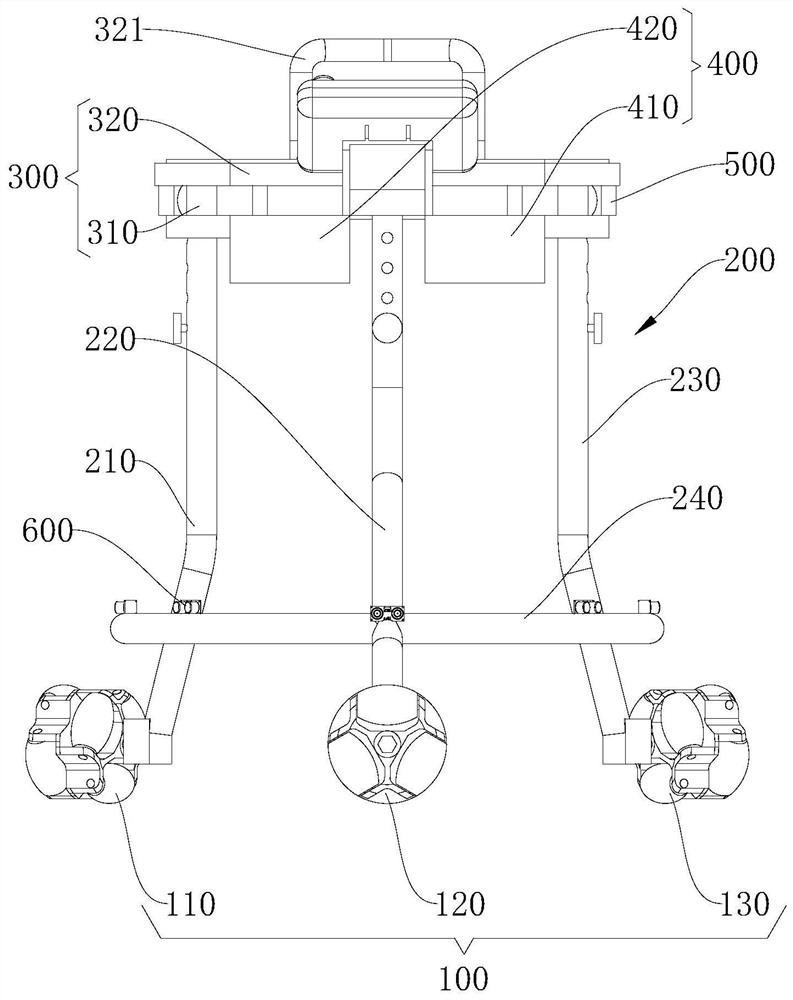
[0039] Please refer to Figures 1 to 7 , the present embodiment provides a control method of an omnidirectional walking training device, which can make walking training cost-effective, high in safety and easy to operate, and the control method of the omnidirectional walking training device can also achieve better training effect, so as to help patients with lower limb dysfunction to recover walking function earlier.
[0040] It should be noted that the control method of the omnidirectional walking training device provided in this embodiment is realized by using the omnidirectional walking training device 10, which includes an omnidirectional driving assembly 100, a bracket structure 200, a supporting assembly 300 and a control module 400 , the omnidirectional drive assembly 100 is connected to the support structure 200, the other end of the support structure 200 is connected to the support assembly 300, the control module 400 is electrically connected to the omnidirectional dr...
no. 2 example
[0056] This embodiment provides an omnidirectional walking training device 10 for implementing the control method of the omnidirectional walking training device provided in the first embodiment. The control method of the omnidirectional walking training device includes: selecting the training mode of the omnidirectional walking training device 10, wherein the optional training modes of the omnidirectional walking training device 10 include the first training mode, the second training mode and the third training mode ;Perform walking training according to the selected training mode.
[0057] It should be noted that the omnidirectional walking training device 10 provided in this embodiment is used to implement the control method of the omnidirectional walking training device provided in the first embodiment, and further assist patients with walking dysfunction to perform recovery training. The omni-directional walking training device 10 provided by the present embodiment compreh...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More