

Vertical profile traction robot
A robot and vertical technology, applied in the field of metal processing, can solve the problems of increasing the footprint of the profile pulling manipulator, and it is difficult to ensure the straightness and straightness of the profile pulling manipulator, so as to achieve stable grasping and reduce the floor space. , the effect of improving quality
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
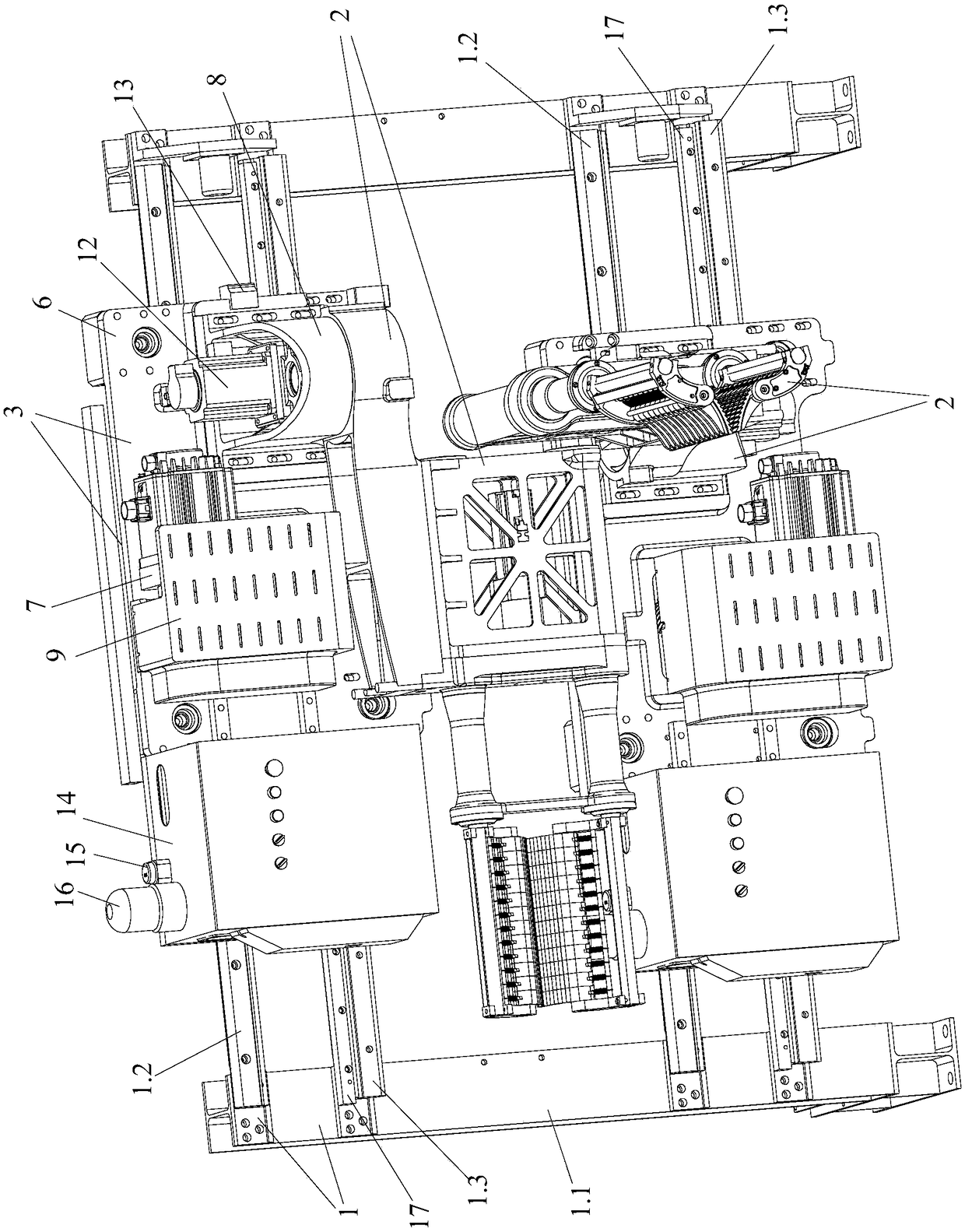
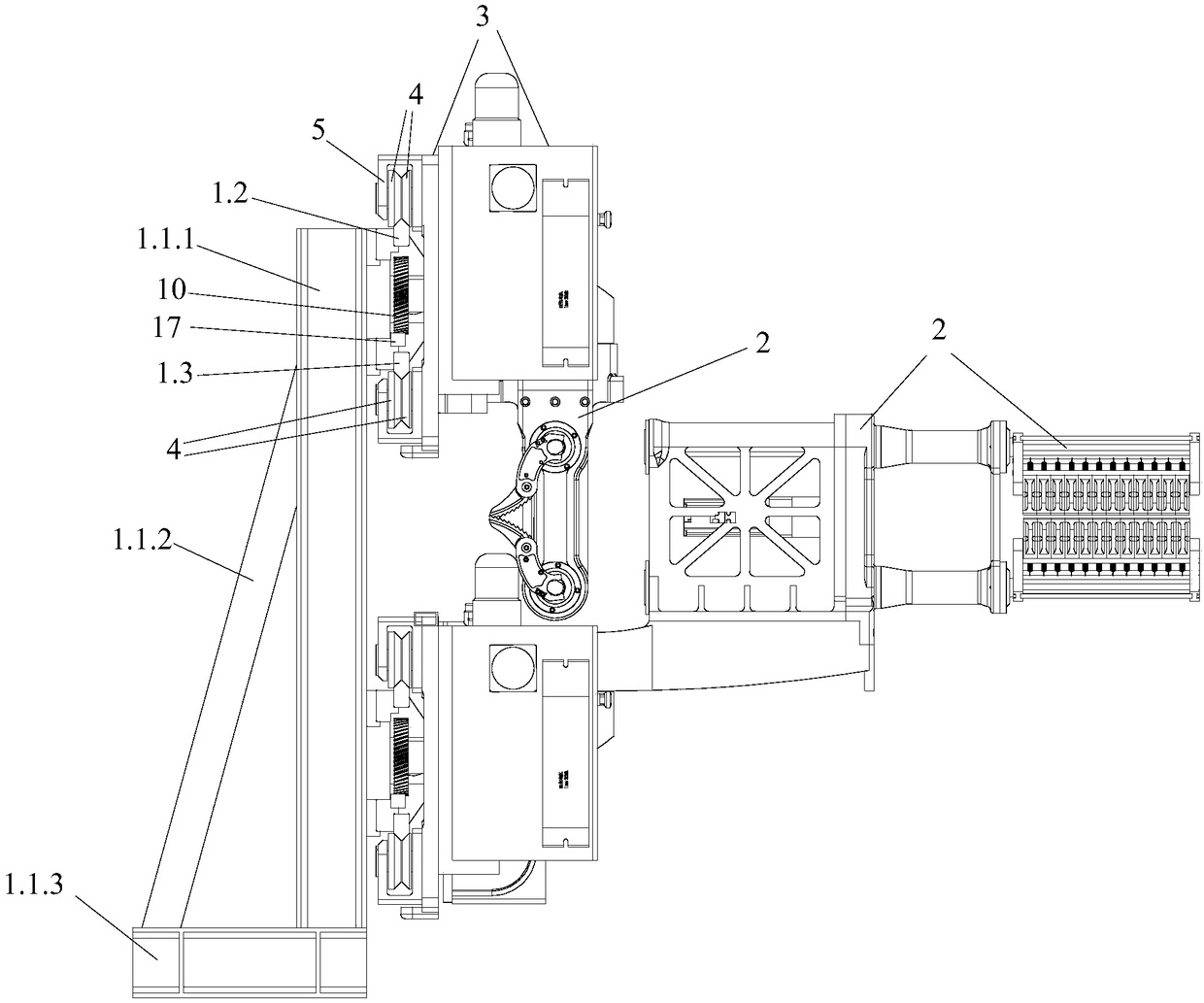
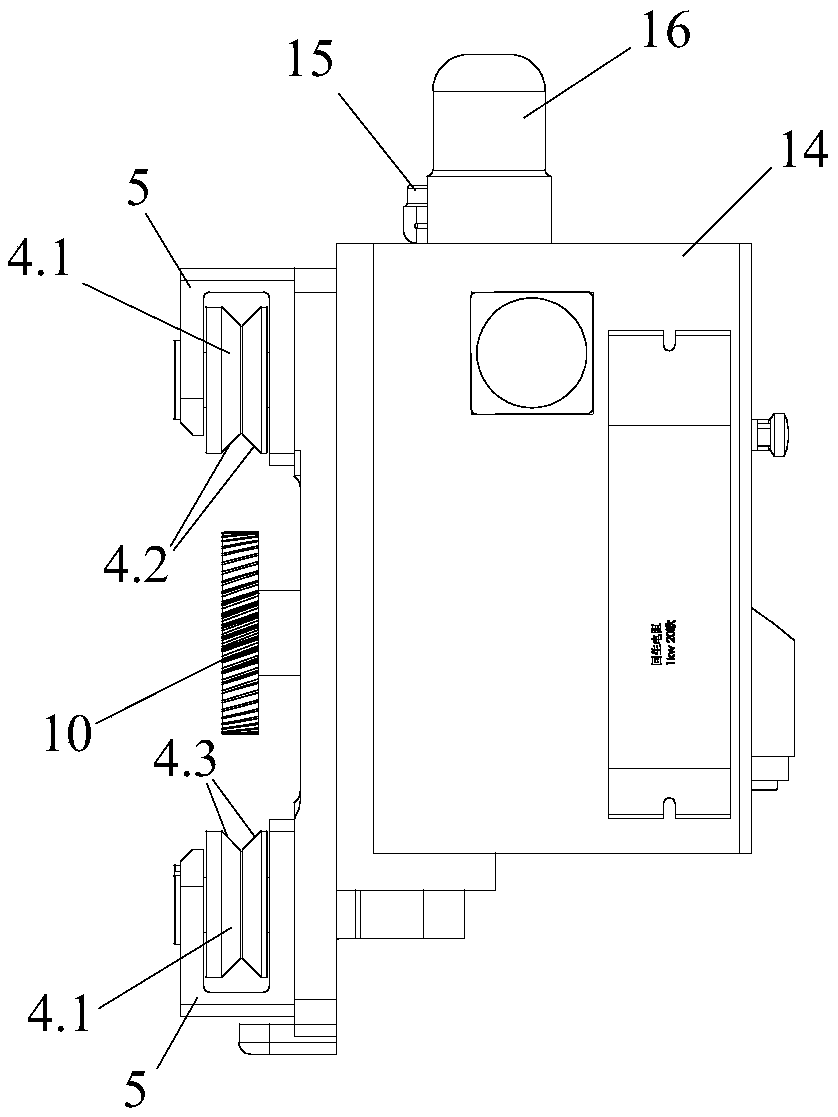
[0053] This embodiment takes the vertical formation of a double-track traction robot as an example to describe the following.
[0054] Such as Figures 1 to 9 As shown, the vertical profile traction robot of the present invention includes a vertical walking guide rail 1, two traction units and a control mechanism 14, wherein each traction unit includes a mechanical arm 2 for clamping traction profiles 18, for The walking guide rail 1 is slidably connected to realize the carriage 3 of the walking movement of the mechanical arm 2, wherein the mechanical arm 2 is clamped on the side of the vertical walking guide rail 1 through the carriage 3, and is slidably connected with the side of the vertical walking guide rail 1, Realize that the mechanical arm 2 is suspended on the side of the vertical walking guide rail 1 for walking movement, and the control mechanism 14 is respectively connected with the carriage 3 and the mechanical arm 2 with signals.
[0055] The two traction units ...
Embodiment 2
[0069] The only difference between this embodiment and the implementation is that this embodiment is a multi-track vertical profile traction robot, which includes a control mechanism, a vertical walking guide rail and is composed of three or more traction units, three traction units Parallel up and down on the vertical walking guide rail, the mechanical arms of two adjacent traction units are suspended on the vertical walking guide rail for coordinated and alternate walking movement, so as to realize the traction of profiles in a coordinated and alternate manner.
[0070] The structure of each traction unit, control mechanism and vertical walking guide rail in this embodiment is consistent with Embodiment 1.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More