

Real-time identification system and method of road surface textures for unmanned vehicle
An unmanned vehicle and recognition system technology, applied in the field of unmanned vehicle road texture recognition system, can solve the problems of low efficiency of manual detection, inability to detect roads, deviation of detection results, etc., to improve efficiency, improve accuracy, and improve reliability. sexual effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0058] The technical solutions of the present invention will be further described below in conjunction with the accompanying drawings and embodiments.
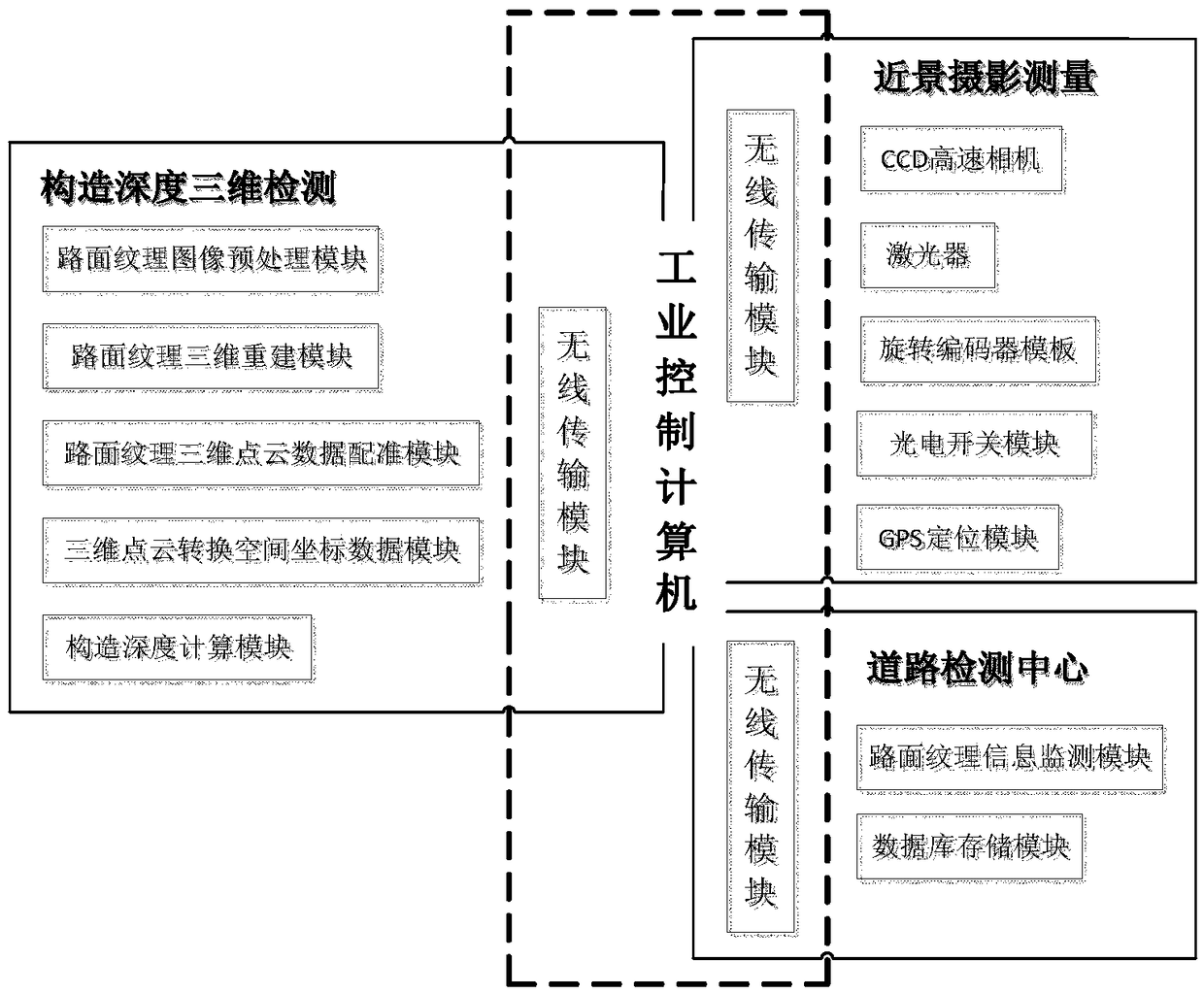
[0059] The present invention provides a system for real-time recognition of road surface texture of an unmanned vehicle, so as to realize real-time acquisition of road surface texture structure depth information during the driving process of the unmanned vehicle, and provide guidance for the braking control strategy of the unmanned vehicle. Wherein the present invention proposes a real-time recognition system for road surface texture of unmanned vehicles, such as figure 1 As shown, it includes: a close-range photogrammetry subsystem, which is used to collect road surface texture elevation information, and sends the collected road surface texture elevation to the road inspection center and the construction depth three-dimensional inspection system through the wireless transmission module; the construction depth three-dimensional...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More