

MCAUPF (Maximum Correntropy Adaptive Unscented Particle Filter) based target tracking method
A technology of particle filter and target tracking, which is applied in radio wave reflection/re-radiation, radio wave measurement system, instrument, etc., can solve problems such as large amount of calculation and difficulty in realization
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0053] The present invention will be further described in detail below in conjunction with the accompanying drawings and specific embodiments.
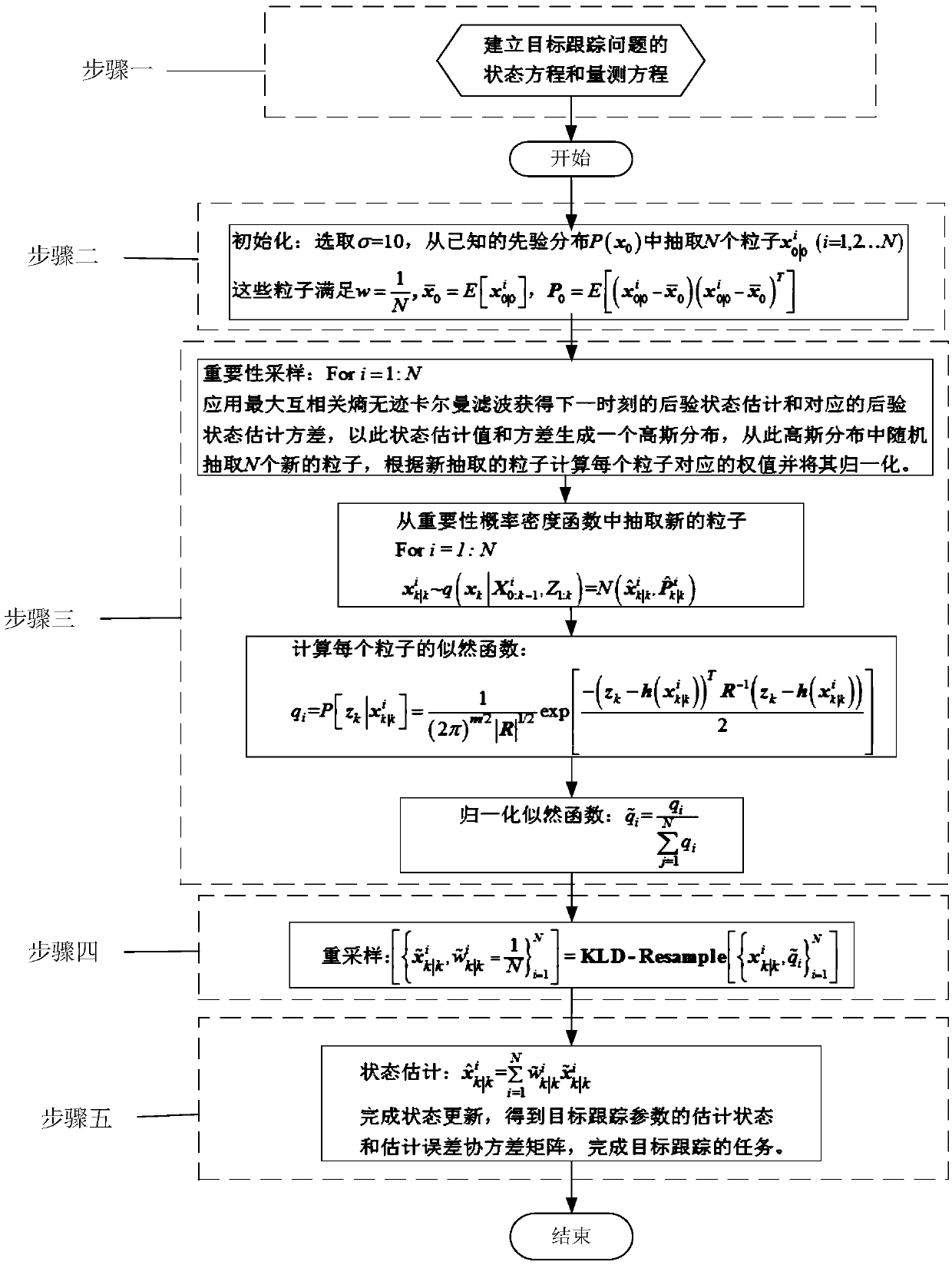
[0054] A kind of target tracking method based on MCAUPF of the present invention, flow chart such as figure 1 shown, including the following steps:
[0055] Step 1: Establish the state equation and observation equation describing the target tracking system as follows:
[0056]
[0057] Among them, k-1 means the k-1th moment, k means the kth moment, x k is the state vector of the n-dimensional tracking target parameters at the kth moment, y k is the measurement vector of the m-dimensional tracking target parameters at the k+1th moment, f( ) and h( ) are known nonlinear functions, w k-1 is the n-dimensional system noise at the k-1th moment, v k is the m-dimensional measurement noise at the kth moment, assuming that the system noise obeys the Gaussian distribution w k-1 ~N(0,Q k-1 ), the measurement noise contains outliers and o...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More