

Abdominal cavity minimally invasive surgery operation robot
A surgical robot and minimally invasive surgery technology, applied in the field of medical devices, can solve the problems of complex drive design, interference of operation accuracy, poor reliability and stability, etc., to improve flexibility and obstacle avoidance ability, increase the range of rotation angle, and simple structure Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0035] The specific embodiments of the present invention will be described in further detail below with reference to the accompanying drawings and embodiments. The following examples are intended to illustrate the present invention, but not to limit the scope of the present invention.
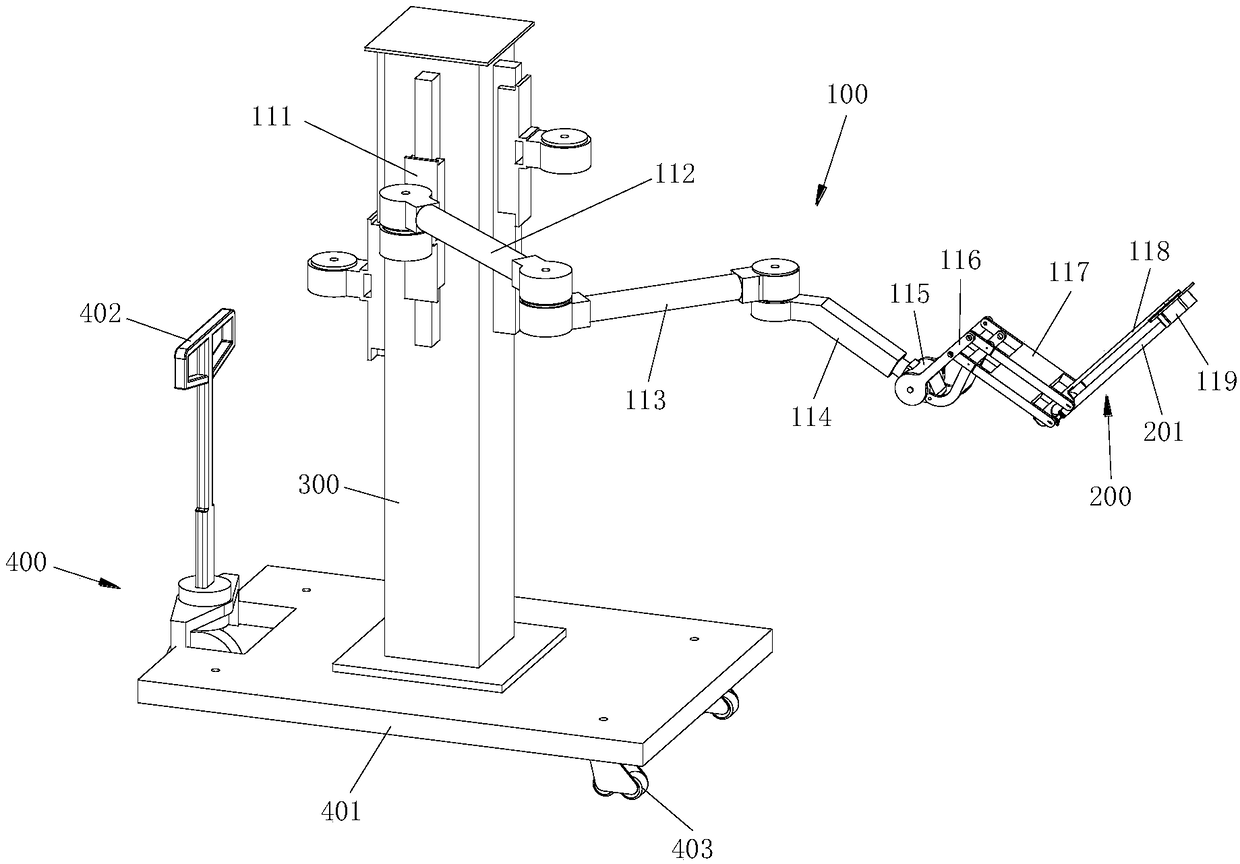
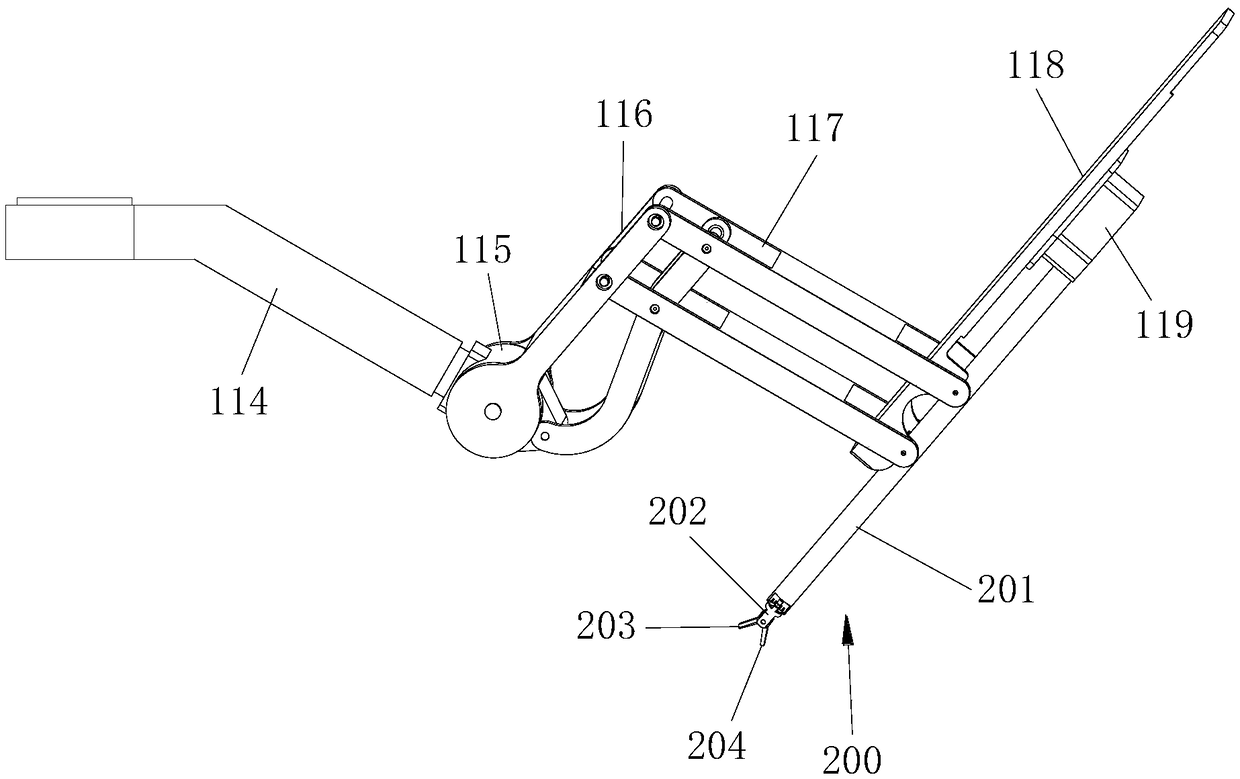
[0036] Refer to the attached figure 1 to attach Figure 5, the minimally invasive abdominal surgery robot in this embodiment, it includes a control device, a frame, at least three mechanical arms 100 connected to the frame, and at least three end effector clips connected to the mechanical arms 100 in one-to-one correspondence holding device 200.
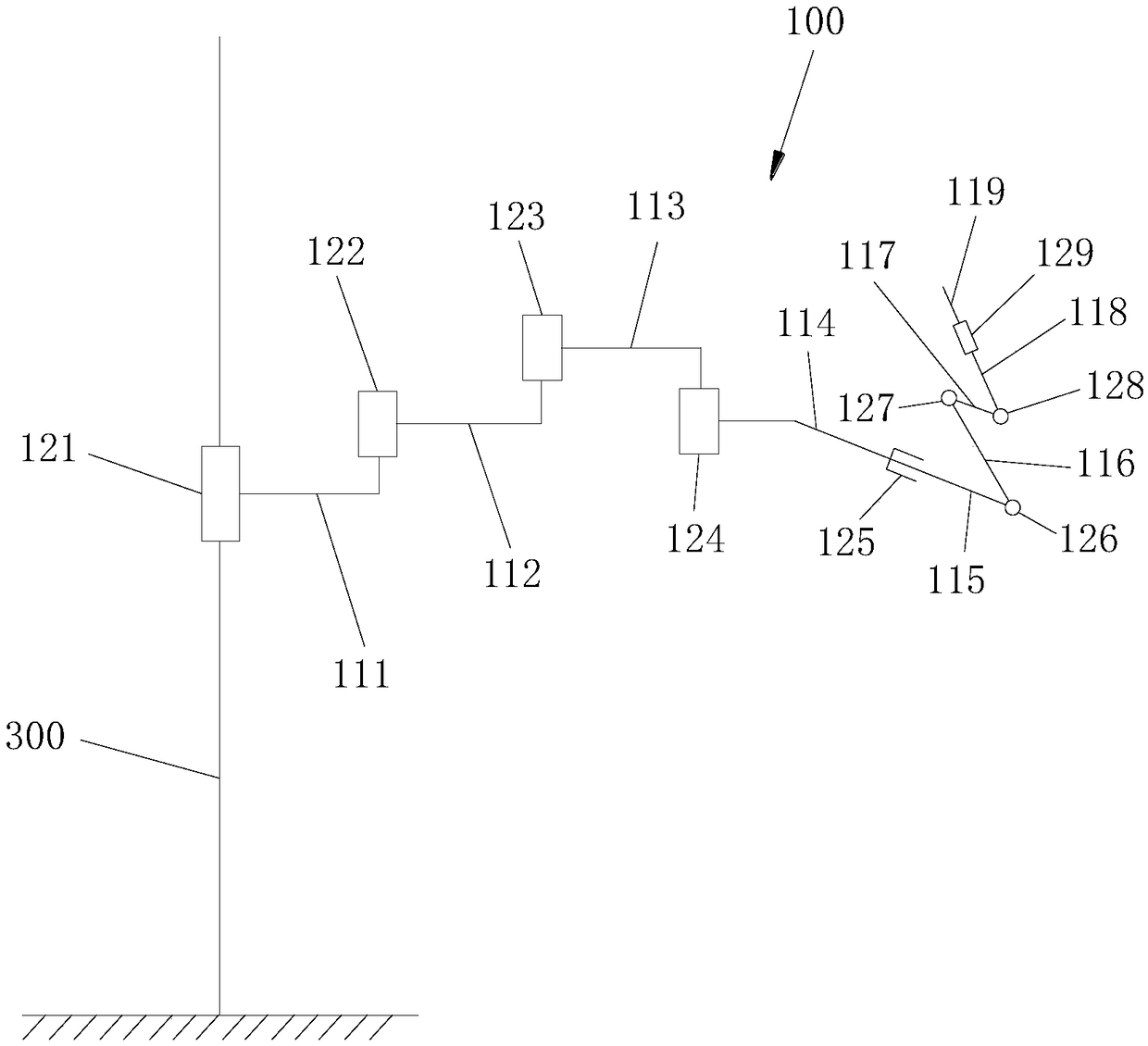
[0037] Each mechanical arm 100 includes a position adjustment mechanism and a telecentric mechanism that can be controlled by a control device. Each robotic arm 100 has nine joints and nine degrees of freedom.
[0038] The position adjustment mechanism is composed of the first four joints of the mechanical arm 100, which is mainly used to realize ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More